Montré par l'éditeur de solutions logicielles embarquées temps réel eSOL pour la première fois lors du salon Embedded World 2023 qui s’est tenu mi-mars, le SDK eMCOS est une plateforme logicielle prête à l'emploi qui vise à faciliter le démarrage des projets de développement dotés de fortes exigences en matière de sûreté de fonctionnement.
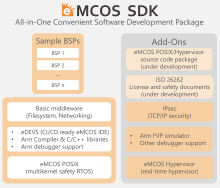
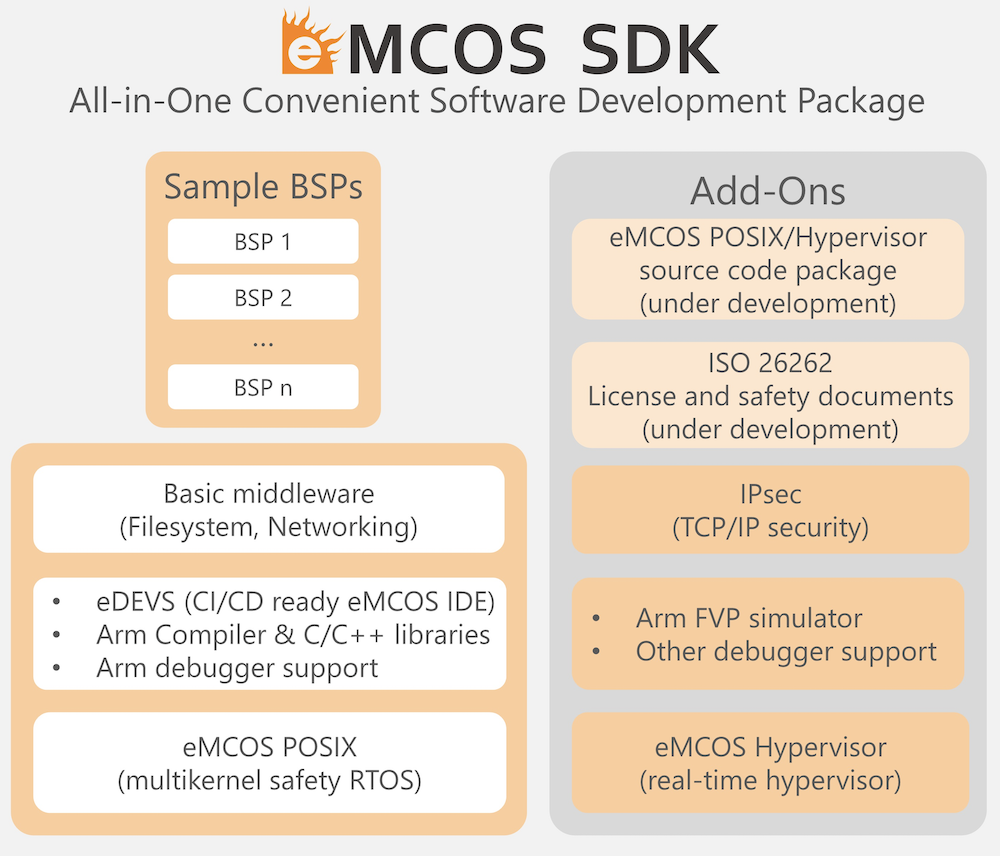
Cette plate-forme, centrée sur le système d'exploitation temps réel multinoyau eMCOS d'eSOL, fournit un ensemble d'outils et d’exécutables qui facilitent le développement et le déploiement d'applications embarquées à criticité mixte plus rapidement et plus facilement qu’auparavant. Avec notamment un système d'installation et d'activation de licence unique, simplifiant de fait l'achat et la gestion des licences. Dans le détail, la plateforme SDK eMCOS regroupe dans un même package intégré tout-en-un des composants logiciels de développement dotés d’un support et d’une maintenance standard.
On y trouve notamment eMCOS Posix, un système d’exploitation temps réel (RTOS) fondé sur une architecture multinoyau évolutive proposant une API Posix étendue et des fonctionnalités de calcul parallèle optimisées pour des plateformes matérielles multicœurs. La plate-forme propose également eDEVS, une suite d'outils logiciels optimisés pour eMCOS Posix et conçue pour s'intégrer dans une chaîne d'outils CI/CD (Continuous Integration / Continuous Development), avec un environnement de construction logicielle (build) fondé sur CMake, des mécanismes d’intégration dans les environnements de développement et de débogage Eclipse/Visual Studio, le tout disponible sur les hôtes Windows et Linux. On y ajoutera un compilateur Arm C/C++ Standard avec des bibliothèques optimisées pour les plateformes matérielles Arm, la prise en charge de la sonde de débogage Arm DStream/DSrteam-ST, un middleware avec un système de gestion de fichiers transactionnel robuste et des communications réseau TCP/IP, et enfin des exemples de BSP pour la prise en charge de plateformes Arm.
Parallèlement, pour compléter le logiciel de base du SDK eMCOS, des modules complémentaires sont également disponibles et préintégrés, comme eMCOS Hypervisor qui procure une technologie de virtualisation temps réel des applications à criticité mixte, capable de prendre en charge les systèmes invités Linux et Android complets.
Enfin, signalons que des packages de code source complet pour eMCOS Posix et eMCOS Hypervisor seront mis à disposition des développeurs dans le courant de l’année, ainsi que des licences et documents relatifs à la précertification ISO 26262 pour la sûreté de fonctionnement dans le monde automobile.





 300x250px.png)