
[APPLICATION TOSHIBA] Les constructeurs automobiles intègrent des dizaines de moteurs électriques dans leurs véhicules. Si certains sont visibles et actionnent les rétroviseurs latéraux et les réglages des sièges, beaucoup sont dissimulés et font fonctionner des ventilateurs et des pompes indispensables. Historiquement, ces applications utilisaient des moteurs à courant continu à balais. Cependant, l'industrie s'oriente rapidement vers les moteurs à courant continu sans balais (brushless DC, BLDC) afin d'obtenir un fonctionnement plus silencieux, un meilleur rendement électrique, une fiabilité accrue et moins de problèmes de compatibilité électromagnétique (EMC). Explications de Toshiba
 Auteur : Klaus Neuenhüskes
Auteur : Klaus Neuenhüskes
Senior Manager Semiconductor Marketing
Toshiba Electronics Europe
Les moteurs BLDC étant à commutation électronique, les équipes d'ingénierie recherchent des semi-conducteurs qui simplifient la mise en œuvre et réduisent le coût de la nomenclature (BOM, Bill Of Material). Les développeurs privilégient alors dans ce cadre les familles de composants évolutives qui leur permettent d'utiliser une seule chaîne d'outils et des architectures uniques pour diverses applications, de quelques watts à plusieurs centaines de watts.
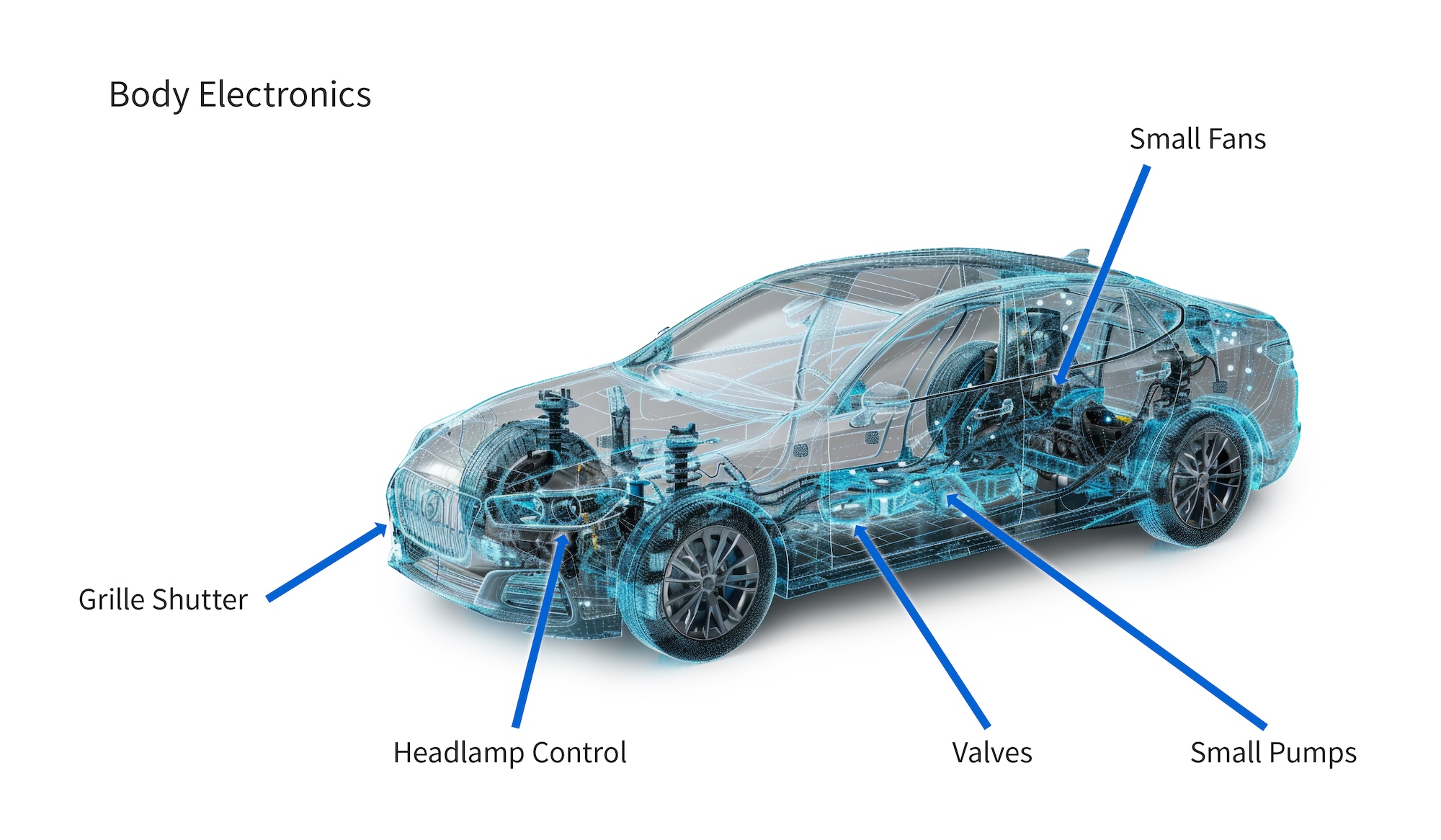
Des dizaines de petits moteurs électriques sont intégrés dans un véhicule moyen
Le principe du contrôle vectoriel "orienté champ" (FOC, field-oriented control) pour les moteurs BLDC repose sur l’application de trois ondes sinusoïdales déphasées de 120° afin de générer un champ magnétique rotatif régulier dans le stator.
L’un des principaux défis de ce processus consiste à s'assurer d'un alignement parfait du signal électrique avec l’orientation mécanique du rotor. En cas de mauvais alignement, le rotor se mettra en place par à-coups, ce qui provoque un bruit audible, des vibrations et une usure accélérée des composants mécaniques associés, tels que les réducteurs.
Traditionnellement, on utilisait des capteurs à effet Hall ou des codeurs pour déterminer l'orientation du rotor. Mais ces dispositifs alourdissent le système et augmentent son coût, et introduisent de nouveaux points de défaillance potentiels. Par conséquent, le contrôle sans capteur est l'option privilégiée.
Dans un système FOC sans capteur, le contrôleur utilise des calculs mathématiques complexes pour estimer l'angle du rotor et le flux magnétique à partir des courants moteur mesurés et des tensions appliquées.
Le courant moteur est généralement mesuré à l'aide de résistances shunt, et un microcontrôleur échantillonne ce courant à des points spécifiques du cycle de modulation de largeur d'impulsion (PWM, pulse-width modulation) en vue de reconstruire les courants de chaque phase.
Des défis dans la mise en oeuvre
Pour simplifier le processus de contrôle, ces courants triphasés sont transformés dans un repère tournant bidimensionnel (axes d et q) à l'aide des transformations de Clarke et de Park. Les régulateurs proportionnels-intégrateurs (PI) régulent ensuite ces courants (Id et Iq) afin de maintenir une avance de phase de 90°, avant qu'une transformation inverse de Clarke/Park ne réinjecte le résultat dans le module PWM.
Ce dernier génère alors le champ statorique triphasé nécessaire à l'entraînement du moteur
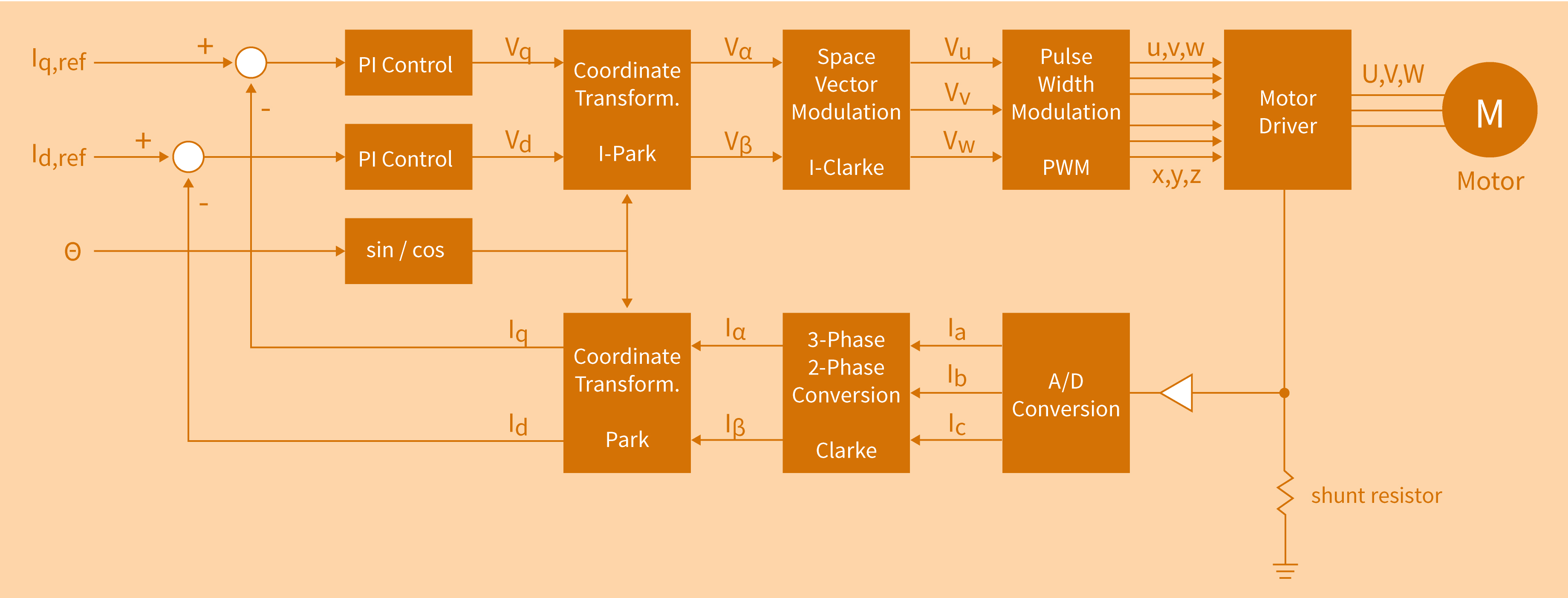
Schéma fonctionnel d'un système FOC sans capteur utilisant des transformations de Clarke/Park
Le calcul de chaque étape de commutation exige une puissance de calcul importante, obligeant souvent les développeurs à utiliser des microcontrôleurs ou des processeurs de signaux numériques (DSP) coûteux et performants.
Pour remédier à ce problème, Toshiba a développé un accélérateur matériel destiné spécirfiquement aux microcontrôleurs, appelé moteur vectoriel (VE, vector engine). En transférant les calculs complexes de transformation de Clarke/Park vers le VE, la charge du processeur principal peut être réduite jusqu'à 70 % par rapport à une implantation purement logicielle.
Ceci libère une capacité de traitement considérable pour d'autres tâches embarquées en temps réel, telles que la communication, la préanalyse des données, le contrôle et la maintenance prédictive.
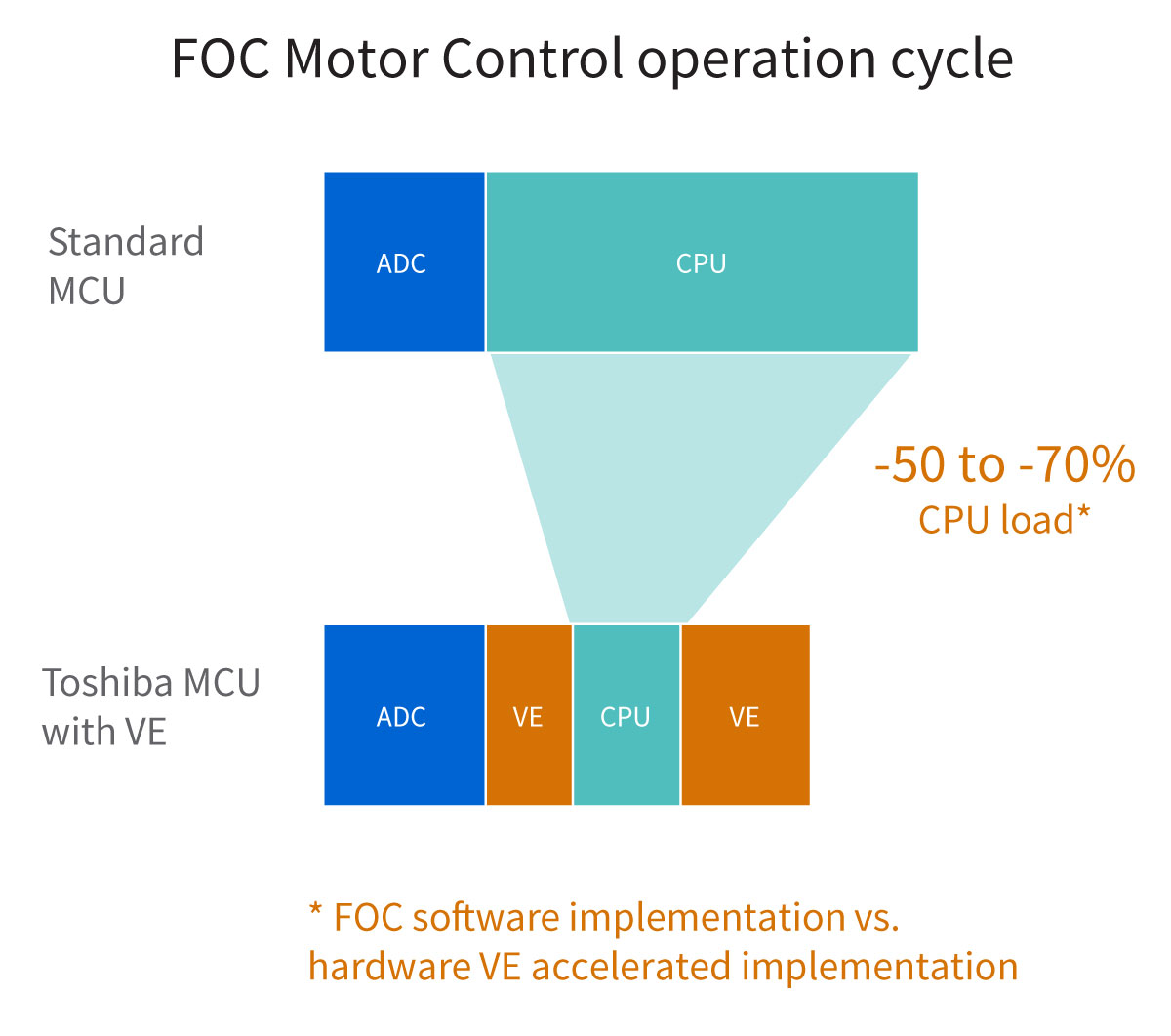
L’utilisation d’un moteur vectoriel dédié aux transformations de Clarke/Park libère une capacité de traitement supplémentaire pour d’autres tâches embarquées en temps réel
Sur ce domaine, la gamme croissante de microcontrôleurs SmartMCD de Toshiba intègre l'Advanced-Vector Engine alpha (A-VEα), la quatrième génération de ce coprocesseur VE.
Les SmartMCD, une famille complète
L’A-VEα introduit ainsi des améliorations telles que la prise en charge d'une synchronisation optimale de détection de courant en configuration "1‑shunt" et un mode de contrôle sans interférences. Parmi les autres nouveautés, citons un planificateur d'exécution des tâches flexible et une intégration poussée avec les canaux du convertisseur analogique-numérique et les signaux PWM du bloc de commande de moteur programmable (PMD, programmable motor driver).
Un temporisateur de phase assure la compensation automatique de l'angle thêta (θ) pour les répétitions programmées et les interactions synchronisées.
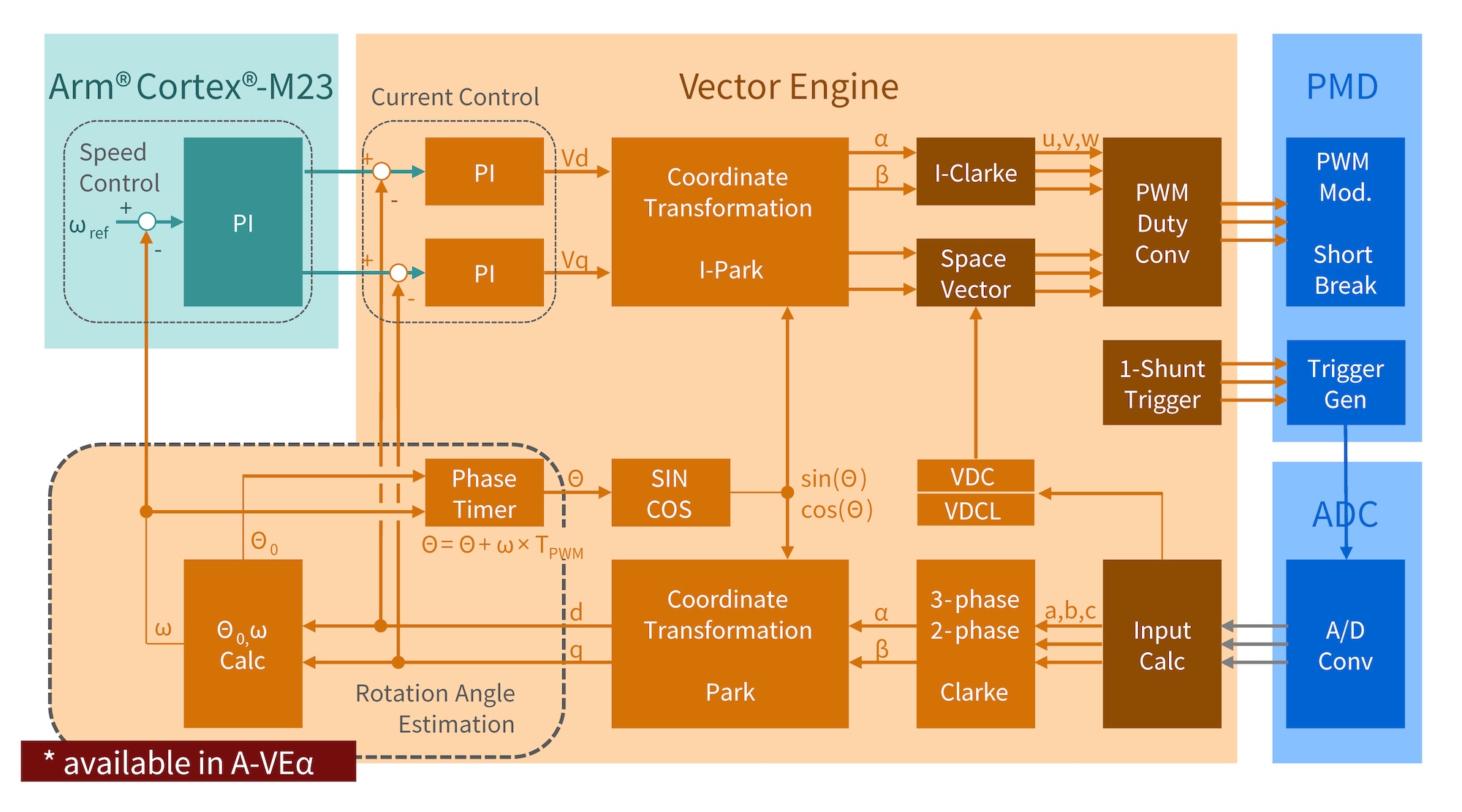
Le coprocesseur vectoriel A-VEα allège la charge de calcul du contrôle FOC dans les dispositifs SmartMCD
Le TB9M040FTG, dernier-né de la famille SmartMCD, est conçu pour les espaces très restreints et les applications automobiles à coût optimisé. Ce dispositif, qualifié AEC-Q100 Grade 0 et conforme à la norme ASIL-B, intègre un étage de pilotage 2 A adapté à la commande de moteurs de moins de 40 W.
Ce dispositif vient compléter la gamme TB9M003/030FG de Toshiba, qui couvre la plage de puissance de 40 W à 1 000 W. Il s'agit également du premier dispositif de la famille à exploiter le processeur Arm Cortex-M23, cadencé jusqu'à 40 MHz pour des performances accrues.
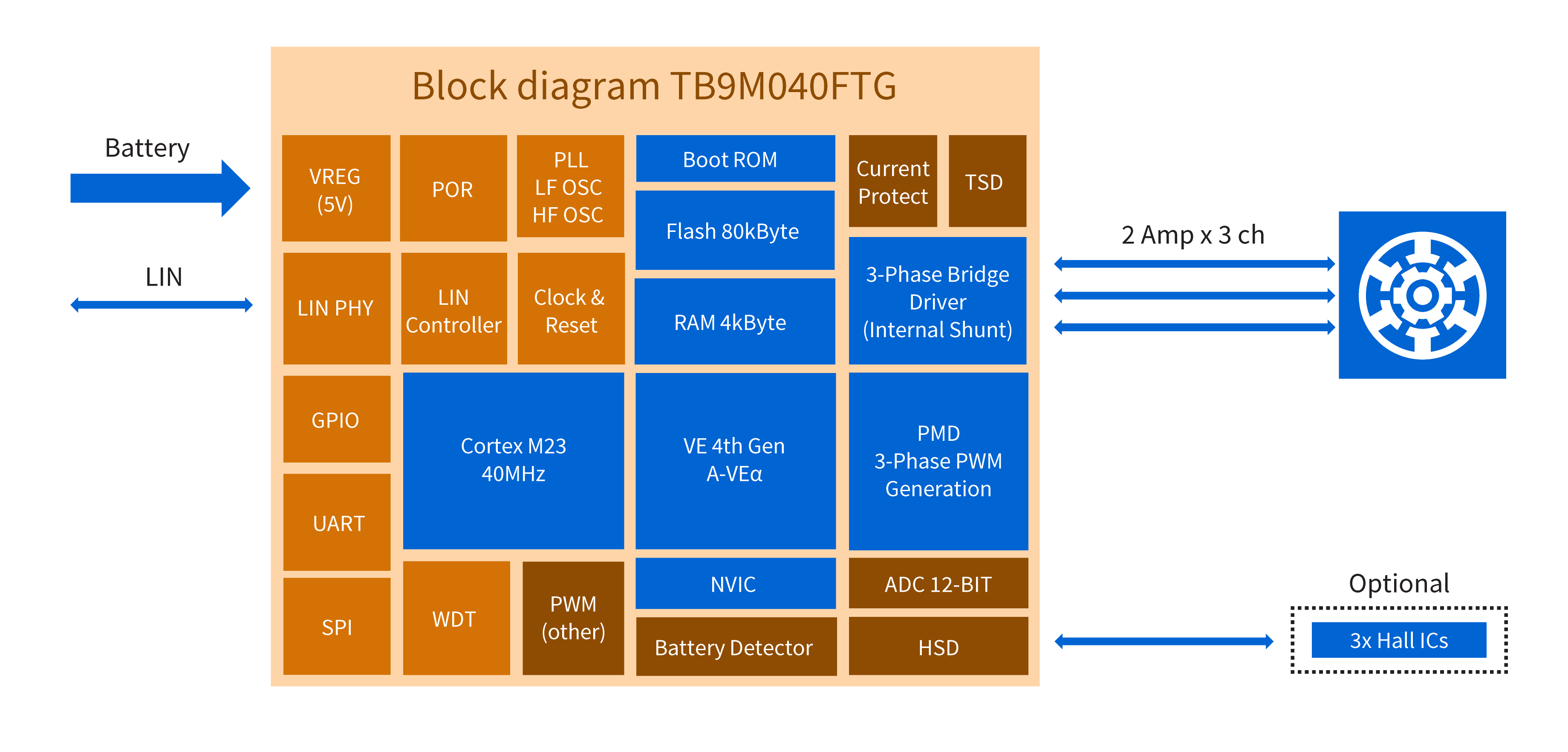
Schéma fonctionnel du TB9M040FTG de Toshiba
Le TB9M040FTG est doté d’un bus LIN (Local Interconnect Network) pour la communication embarquée et d’un régulateur 5 V intégré permettant son alimentation directe par le réseau 12 V du véhicule. Il intègre également une protection contre les surintensités et la surchauffe, ainsi qu’une interface pour les capteurs à effet Hall et les codeurs, si nécessaire.
Les fonctionnalités de l'appareil sont complétées par un convertisseur analogique-numérique sur 12 bits, de 80 Ko de mémoire flash, de 4 Ko de mémoire Sraam et 12 de Ko de mémoire ROM de démarrage, l'ensemble de la mémoire étant protégé par un code de correction d'erreurs (ECC).
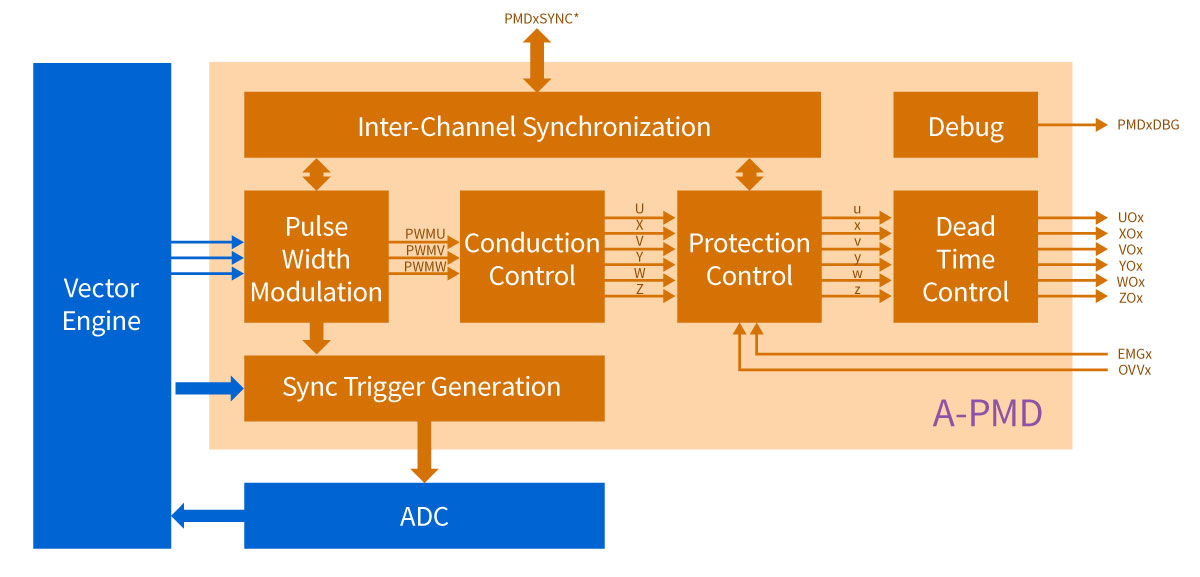
Ce circuit intègre également plusieurs périphériques avancés pour garantir un contrôle flexible et robuste dans diverses applications. L'unité PMD génère des porteuses PWM triphasées complémentaires - de 0,06 kHz à 117 kHz - avec des formes d'onde et des déphasages sélectionnables individuellement. Il intègre une protection contre les surintensités et une régulation du temps mort afin d'éviter les courts-circuits entre les phases supérieure et inférieure.
Architecture logicielle FOC sans capteur pour le TB9M040FTG
Contrairement aux autres composants de la gamme, le TB9M040FTG est doté d'un étage d'onduleur triphasé intégré avec des MOSFET "high-side" » et "low-side" permettant de piloter jusqu'à 2 A.
Il comprend une régulation de la vitesse de balayage programmable par registre pour optimiser la compatibilité électromagnétique (CEM) et une gestion matérielle des défauts qui surveille les circuits ouverts "drain-source". En cas de défaut, le circuit de commande du pont met toutes les sorties dans un état de haute impédance afin de protéger le moteur. Bien qu'optimisé pour la commande vectorielle sans capteur, le dispositif intègre ausssi un périphérique spécifique aux applications nécessitant une acquisition mécanique précise.
Le circuit d'entrée d'encodeur avancé (32 bits) (A-ENC32) prend en charge les encodeurs incrémentaux (types AB et ABZ), les capteurs à effet Hall biphasés et triphasés, ainsi que la détection de passage par zéro pour les moteurs à commande par force contre-électromotrice (back-electromotive force, BEMF).
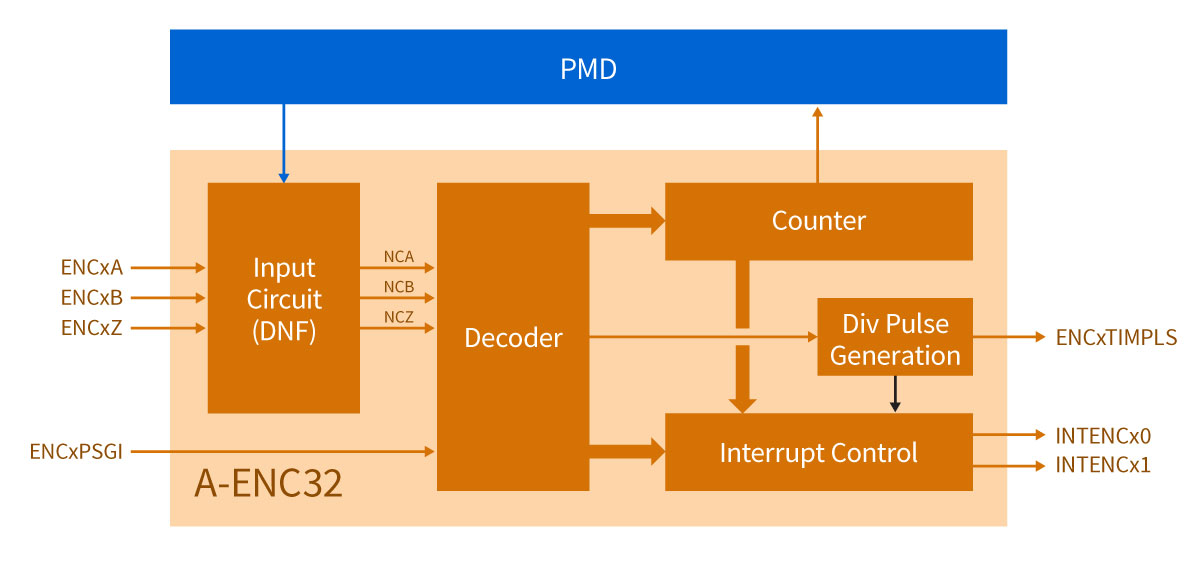
Le périphérique A-ENC32 prend en charge à la fois les codeurs incrémentaux et les circuits intégrés de capteurs à effet Hall
Afin d'aider les équipes de développement à tirer parti de leur expertise existante, Toshiba propose un ensemble de modules logiciels. L’architecture logicielle est clairement divisée en pilotes de bas niveau (LLD, low-level drivers) pour la commande des périphériques communs du microcontrôleur, et en pilotes de commande moteur de niveau supérieur (MC_FOC).
L’évaluation du logiciel du TB9M040FTG est possible à travers des versions non commerciales du code objet et du code source. Une version sous licence pour un usage commercial, incluant le code source, est également disponible.
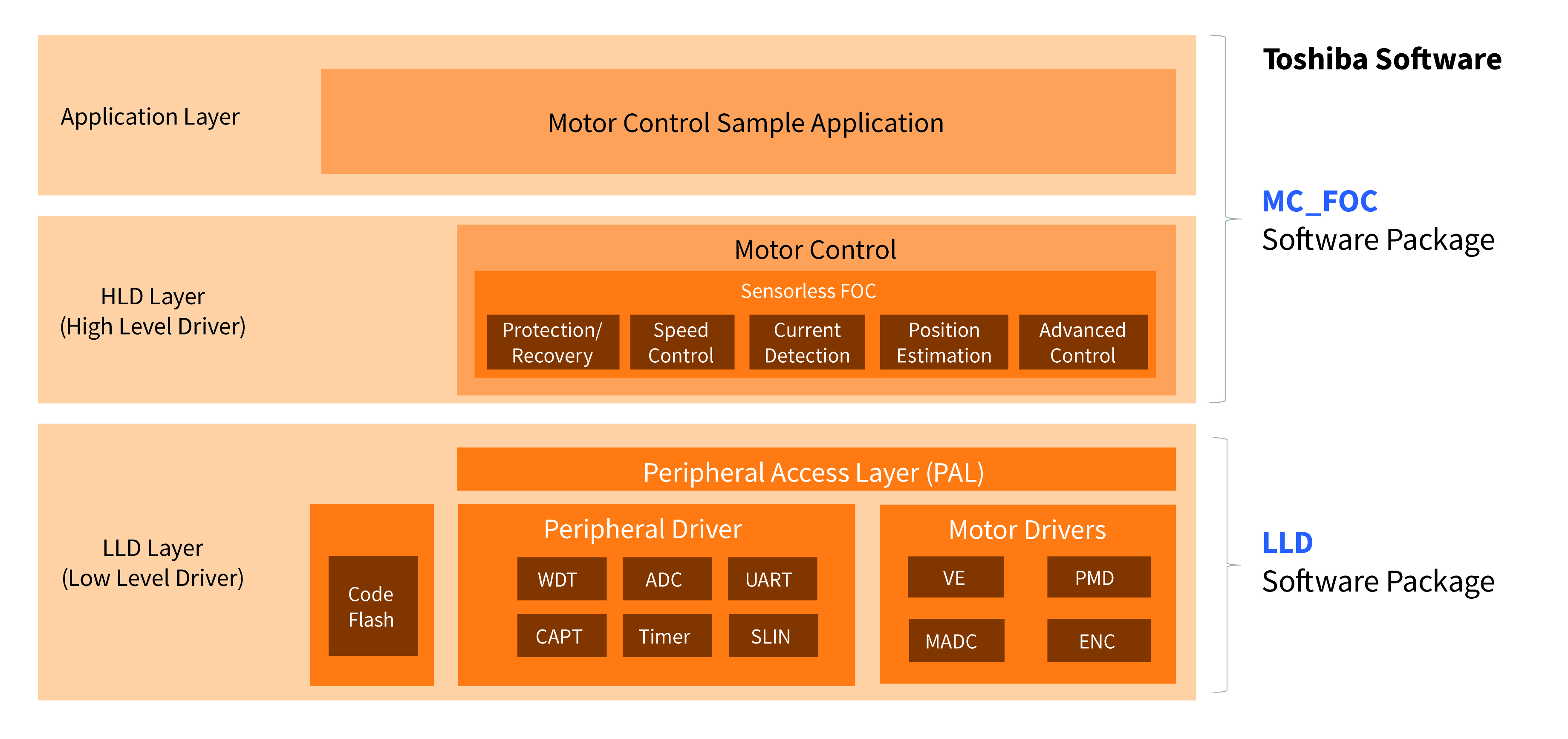
Architecture logicielle FOC sans capteur pour le TB9M040FTG
Face à cette approche liée à l'utilisation de la la commande vectorielle (FOC) pour réduire le bruit et les vibrations en fonctionnement, les équipes de développement recherchent des familles de contrôleurs de moteurs évolutives.
Cela leur permet de réutiliser le temps investi dans les conceptions précédentes et l'environnement de développement logiciel pour diverses applications, évitant ainsi de réinventer la roue.
Dernier-né de la famille SmartMCD, le TB9M040FTG avec ses pilotes de moteur intégrés est idéal pour les applications économiques et compactes de moins de 40 W, et complète le TB9M003/030FG.




 300x250px.png)