
A travers sa marque UP Bridge The Gap, la société Aaeon, spécialiste des modules, cartes et plates-formes pour l’embarqué, s'est associée à Intel pour lancer deux nouvelles générations de kits de développement robotiques dont l’objectif affiché est de simplifier l'évaluation et le développement de robots professionnels.
 Selon Aaeon, le développement et le déploiement d'une solution robotique complète est un processus complexe qui peut prendre des années. Les développeurs sont confrontés à des défis lors de la sélection des composants et du logiciel robotique avec les difficultés d’intégration qui s’ensuivent. Pour aider à réduire ces temps de développement, les kits de développement proposés sont des prototypes intégrés de robots à quatre roues qui peuvent se déplacer de manière omnidirectionnelle, détecter et cartographier leur environnement, éviter les obstacles et détecter personnes et objets.
Selon Aaeon, le développement et le déploiement d'une solution robotique complète est un processus complexe qui peut prendre des années. Les développeurs sont confrontés à des défis lors de la sélection des composants et du logiciel robotique avec les difficultés d’intégration qui s’ensuivent. Pour aider à réduire ces temps de développement, les kits de développement proposés sont des prototypes intégrés de robots à quatre roues qui peuvent se déplacer de manière omnidirectionnelle, détecter et cartographier leur environnement, éviter les obstacles et détecter personnes et objets.
« Nous avons développé une solution complète pour que les développeurs n'aient pas à repartir de zéro, précise Daniele Cleri, architecte logiciel IA et IoT chez Aaeon Europe. Le matériel et les logiciels sont déjà intégrés dans le kit pour permettre un démarrage sans difficulté pour les développeurs. De ce fait les utilisateurs peuvent avoir un robot fonctionnel pour commencer à travailler avec des fonctionnalités de base. Ensuite, ils peuvent personnaliser leurs robots en fonction de leur cas d'usage spécifique et commencer à les déployer en volume. »
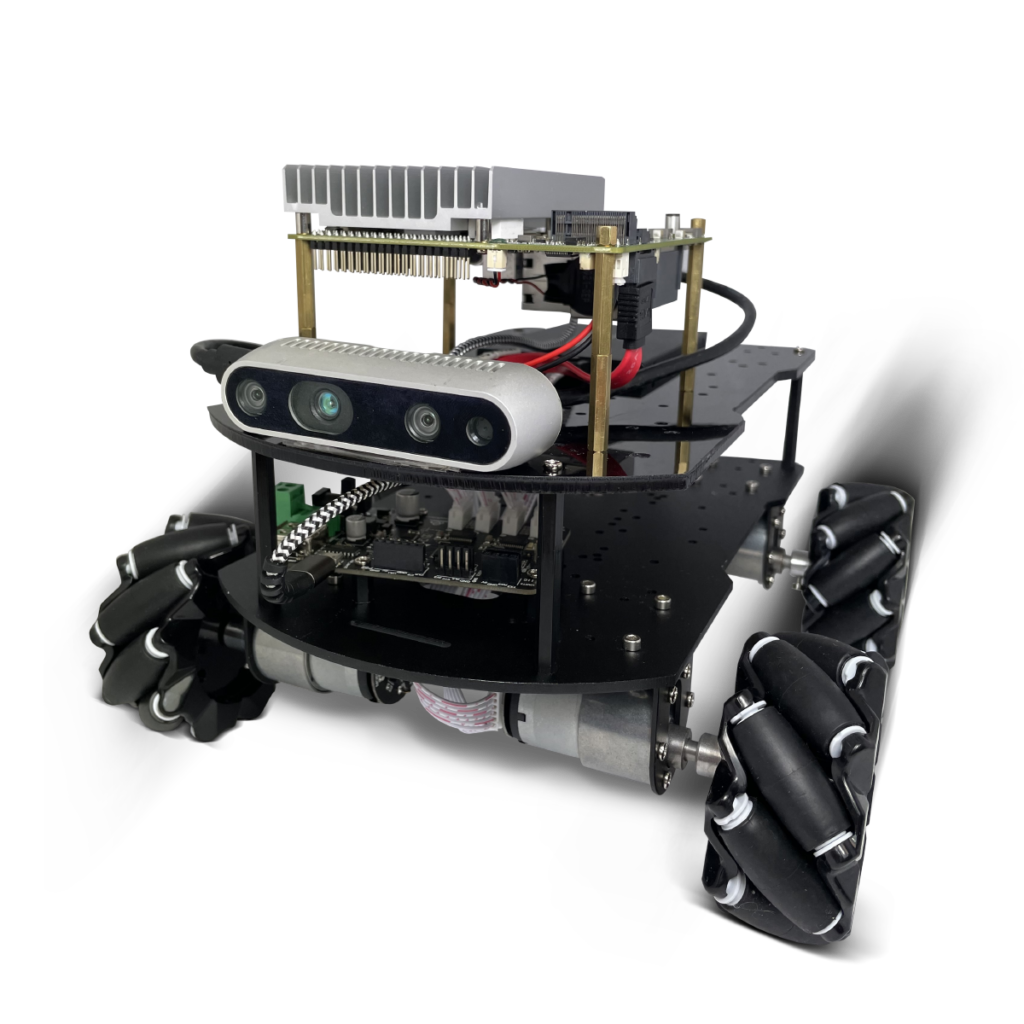
Concrètement ces kits de développement robotiques sont constitués d’une unité de traitement (carte UP Xtreme i11 ou UP Squared 6000), d’une unité de vision (caméra RealSense D435i d’Intel), d’une unité de gestion des mouvements (avec une carte de commande moteur, quatre moteurs et quatre roues mécaniques) et, côté logiciel, du SDK EI for AMR d’Intel (Edge Insights for Autonomous Mobile Robots).
Les développeurs peuvent ainsi choisir entre les unités de calcul UP Xtreme i11 ou UP Squared 6000, la première étant architecturée autour d’un processeur Intel Core de 11e génération avec la puce graphique Iris Xe, la seconde bâtie autour des processeurs Atom x6000E d’Intel afin d’obtenir une efficacité énergétique optimale et une autonomie des batteries prolongée.
La caméra RealSense D435i d’Intel intègre de son côté une unité de mesure inertielle qui ouvre la porte à des applications de type SLAM (Simultaneous Localization and Mapping) et de suivi d’actifs, dans lesquelles l’unité de meure inertielle permet aux applications d'affiner la détection de l'emplacement d’un robot dans toutes les situations où il se déplace.
Le logiciel prévalidé EI for AMR, fondé sur l’environnement Robot Operating System 2 (ROS 2) et doté de progiciels conteneurisés pour l'acquisition de données de capteur, la classification, la modélisation d'environnement, la planification d'action et le contrôle d'action, aide quant à lui à orchestrer chaque composant matériel afin de minimiser les temps d'évaluation et de développement lors des phases d’intégration.




 300x300px.png)