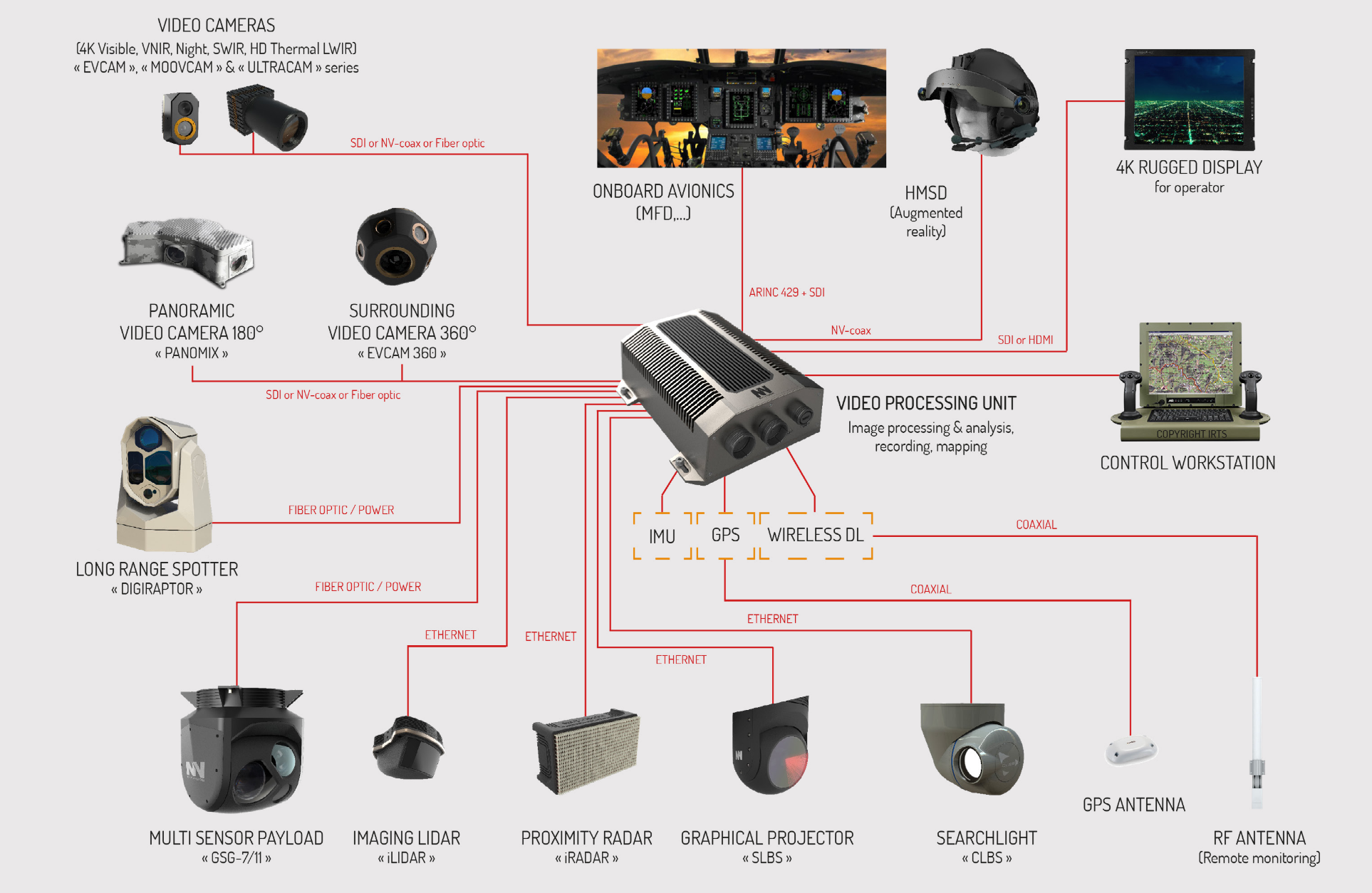
Pensé en particulier pour les applications dites de “conscience situationnelle” (SA, Situational Awareness) souvent mises en avant dans les projets mil-aéro actuels (*), le calculateur embarqué du français Nexvision, baptisé eVPU, est destiné à traiter de très gros flux de données émanant d'un ensemble de capteurs (caméras, radar, lidar…).... Pour ce faire, le système embarque un FPGA qui réalise du prétraitement de signaux et jusqu’à trois modules graphiques (GPU) Jetson AGX Xavier de Nvidia capables de gérer jusqu’à 100 Gbit/s de flux vidéo pour une puissance de calcul jusqu’à 100 Tops et une consommation qui s'étage entre 35 W et 120 W selon les configurations.
Le FPGA embarqué qui affiche 650K éléments logiques est associé à 22 Mo de mémoire SRam, jusqu’à trois blocs mémoire DDR4 de 1 Go chacun (à 2 666 Mbit/s) et 512 Mo de mémoire flash NOR.
Pour rappel, le module Jetson AGX Xavier aux dimensions de 105 x 105 mm pour une enveloppe thermique inférieure à 10 W, se déploie autour d’une puce-système Xavier. Ce SoC embarque un bloc personnalisé de huit cœurs de processeurs généralistes 64 bits à architecture Arm v8.2, une unité de traitement graphique (GPU) à 512 cœurs Volta et 64 cœurs Tensor, un ou deux accélérateurs d'algorithmes d’apprentissage profond (NVDLA), un accélérateur de vision artificielle VLIW et un ou deux codeurs/décodeurs vidéo 4K/60p/HEVC. Avec une capacité de calcul de 32 Tops.
Les applications visées par l'eVPU vont des domaines de la recherche et du sauvetage, jusqu’à la projection d’informations graphiques en passant par l’identification de menaces, la planification de trajectoires, la cartographie 3D, etc. La plate-forme de calcul eVPU, qui affiche des dimensions de 300 x 220 x 109 mm pour un poids de 5,5 kg, peut être embarquée dans des blindés, des hélicoptères, des drones ou toute autre sorte de véhicule autonome ou semi-autonome.
(*) Le "situational awareness" est une aide à la perception et à la prise de conscience d’un environnement qui permet à une personne d’appréhender son espace proche avec une performance supérieure à celle que ses propres sens peuvent atteindre en temps réel, l’aidant à réagir et à interagir tout en accomplissant une mission. Cette approche s’appuie sur une combinaison de capteurs à larges champs de perception, d’algorithmes d’analyse des données issues des capteurs et d’une architecture de calcul puissante complétée par une interface homme-machine ergonomique capable de présenter les résultats issus de ces analyses.
-fr.jpg)