Une plate-forme de simulation intégrée valide la sécurité des véhicules autonomes
Les systèmes de conduite autonomes s'appuient sur des capteurs et des logiciels embarqués pour la localisation, la perception, la planification et l'exécution des mouvements d'un véhicule. Ces systèmes complexes ne peuvent être mis sur le marché et intégrés dans des véhicules que si les développeurs ont démontré leur capacité à atteindre des niveaux de sécurité extrêmement élevés. Aujourd’hui ces systèmes sont en grande partie construits avec des algorithmes d'apprentissage dit profond (deep learning) entrainés pour prendre la bonne décision dans presque toutes les situations de conduite. Cependant, ils n'ont pas les exigences et l'architecture détaillées qui ont été la règle jusqu'à présent pour valider les logiciels critiques pour la sécurité, tels ceux qui contrôlent les avions de ligne commerciaux.
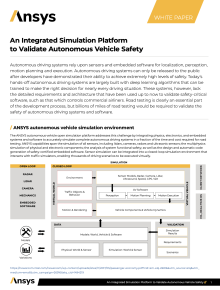
Dans ce contexte, Ansys explique dans ce white paper de 9 pages en anglais concrètement, et en détail, comment une plate-forme de simulation en boucle fermée pour les tests virtuels de systèmes de conduite autonomes (avec des modèles de capteurs physiquement précis, un environnement et des scénarios virtuels, ainsi que des tests virtuels SIL et HIL) valide la réponse à tout scénario de conduite.
Télécharger le whitepaper :
Pour recevoir le whitepaper, merci de remplir le formulaire suivant.
Il vous sera envoyé en pièce jointe par mail à l'adresse que vous aurez indiqué.
 300x250px.png)