
[TRIBUNE de Rémi Régnier, LNE] Les progrès de l’intelligence artificielle (IA) permettent d’envisager de faire rouler des véhicules de manière autonome dans des environnements de plus en plus complexes. Mais le développement de ces véhicules autonomes dépend étroitement de la mise en place de moyens de tests permettant in fine de les homologuer, domaine dans lequel le LNE joue un rôle central.
Le niveau d’autonomie d’un véhicule est apprécié sur une échelle graduée de 1 à 5, où seuls les véhicules atteignant le niveau 3 sont considérés comme relevant de la conduite automatisée. En France, seuls des véhicules jusqu’au niveau 2 ont été homologués à ce jour, c’est-à-dire des véhicules offrant une aide à la conduite tels le maintien sur la voie ou le freinage d’urgence. Dans le monde, seuls deux véhicules de niveau 3 ont actuellement reçu une homologation : la Mercedes Classe S en Allemagne et la Honda Legend au Japon.
Dans le cadre du niveau 3, le conducteur est tenu de pouvoir reprendre la main à tout instant, et l’autonomie du véhicule est limitée à certaines situations spécifiques (vitesse réduite, absence de piétons, etc.). Au-delà, au niveau 4, la conduite peut être automatisée sans supervision d’un conducteur dans un périmètre restreint. Enfin, un véhicule de niveau 5 est censé pouvoir s’insérer dans le trafic quelles que soient les circonstances. Il y a une dizaine d’années, on imaginait que des véhicules de niveaux 4 et 5 seraient une réalité vers 2020. Or à ce jour, si des expérimentations de niveau 4 ont lieu, le niveau 5 demeure un horizon lointain.
Globalement, on sait aujourd’hui faire fonctionner des véhicules autonomes en milieu fermé, c’est-à-dire où les conditions sont connues et contrôlées. En revanche, l’un des freins à leur essor réside dans la difficulté de garantir un niveau de sécurité acceptable en route ouverte, tout en gardant une conduite agréable pour l’usager (éviter les freinages intempestifs…). Au vu de la complexité de l’environnement routier et du nombre potentiellement infini de situations à considérer, il faudrait pouvoir tester un véhicule autonome sur des milliards de kilomètres pour démontrer qu’il respecte bien les critères de sécurité, en s’assurant que le test couvre bien toutes les circonstances de conduite possibles. C’est évidemment impossible en pratique.
 Ainsi, aujourd’hui, on restreint les plages de fonctionnement des véhicules autonomes, ce que les spécialistes appellent l’Operational Design Domain ou ODD, c’est-à-dire les caractéristiques de l’environnement dans lesquelles le véhicule est censé rouler (caractéristiques de la route, type de trafic, conditions de luminosité, etc.). Ces restrictions permettent de diminuer la combinatoire des situations à tester avant homologation. Cependant, les essais doivent permettre de vérifier la totalité des comportements du véhicule au sein de cet ODD, et de s'assurer que les situations en dehors de l’ODD ne mènent pas à des comportements dangereux du véhicule. L’une des clés consiste alors dans le recours à la simulation numérique en sus des essais réels, permettant de garantir l’exhaustivité des conditions testées et le réalisme des coûts nécessaires à la réalisation de ces essais. Dans ce cadre, le LNE est aujourd’hui devenu un acteur incontournable sur le domaine de la simulation des véhicules autonomes.
Ainsi, aujourd’hui, on restreint les plages de fonctionnement des véhicules autonomes, ce que les spécialistes appellent l’Operational Design Domain ou ODD, c’est-à-dire les caractéristiques de l’environnement dans lesquelles le véhicule est censé rouler (caractéristiques de la route, type de trafic, conditions de luminosité, etc.). Ces restrictions permettent de diminuer la combinatoire des situations à tester avant homologation. Cependant, les essais doivent permettre de vérifier la totalité des comportements du véhicule au sein de cet ODD, et de s'assurer que les situations en dehors de l’ODD ne mènent pas à des comportements dangereux du véhicule. L’une des clés consiste alors dans le recours à la simulation numérique en sus des essais réels, permettant de garantir l’exhaustivité des conditions testées et le réalisme des coûts nécessaires à la réalisation de ces essais. Dans ce cadre, le LNE est aujourd’hui devenu un acteur incontournable sur le domaine de la simulation des véhicules autonomes.
Un laboratoire d'IA et des projets de recherche en cours
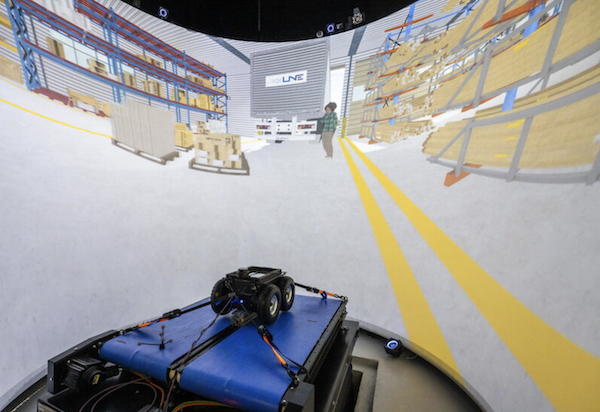
Concrètement, le LNE, au travers de son laboratoire d’évaluation de l’intelligence artificielle, et plus particulièrement de sa plateforme LE.IA Immersion, est impliqué dans plusieurs projets visant à développer des moyens de tests pour les véhicules autonomes. Ainsi, le projet français 3SA, en cours de finalisation et impliquant l’IRT SystemX, le CEA, le LNE et plusieurs industriels comme Renault ou Stellantis, visait le développement de méthodes et d’outils de simulation impliquant la modélisation des capteurs, la mise à disposition d’une bibliothèque de scénarios, le développement d’une méthode d’analyse des résultats de simulations et la constitution d’un référentiel méthodologique. Dans ce cadre, le LNE a développé des références, définissant ce que doivent être les réponses appropriées d’un véhicule autonome, ainsi qu’un cadre d’évaluation permettant d’établir si le test est valide ou non. Le tout en s’assurant d’une couverture totale de l’ODD et en travaillant à la fois sur la robustesse des systèmes, c’est-à-dire leur stabilité et leur résistance aux perturbations environnementales, et leur résilience.
 Parallèlement, le LNE participe également au projet Prissma porté par le ministère chargé des Transports et supervisé par l’UTAC et l’université Gustave-Eiffel. Rentrant dans sa dernière année, la vocation du projet est de créer des méthodologies d’homologation des composants IA pour le véhicule autonome. Aux côtés d’une vingtaine de partenaires académiques et industriels, le LNE a joué un rôle majeur en pilotant trois des huit thématiques mises en avant par le projet : création du protocole d’évaluation global et définition des exigences pour l’homologation, tests en simulation et leurs enjeux (réalisme, interopérabilité, représentativité…), et tests en milieu contrôlé et définition des bancs d’essais.
Parallèlement, le LNE participe également au projet Prissma porté par le ministère chargé des Transports et supervisé par l’UTAC et l’université Gustave-Eiffel. Rentrant dans sa dernière année, la vocation du projet est de créer des méthodologies d’homologation des composants IA pour le véhicule autonome. Aux côtés d’une vingtaine de partenaires académiques et industriels, le LNE a joué un rôle majeur en pilotant trois des huit thématiques mises en avant par le projet : création du protocole d’évaluation global et définition des exigences pour l’homologation, tests en simulation et leurs enjeux (réalisme, interopérabilité, représentativité…), et tests en milieu contrôlé et définition des bancs d’essais.
Le LNE intervient également sur la partie audit des solutions IA, l’analyse de la cybersécurité et marginalement sur les essais sur route. Par ailleurs, le LNE est impliqué dans le projet TEF (Testing and Experimentation Facilities) Smart Cities & Communities. Financé par l’Union européenne et les États membres (au travers de la Stratégie nationale pour l’IA pour la France), le projet vise à rendre accessibles au tissu industriel européen des méthodes et des moyens d’essais pour qualifier la performance, la fiabilité et la robustesse des systèmes IA, et d’établir s’ils sont dignes de confiance. Précisément, le LNE pilote à ce niveau le sous-nœud français du projet (constitué par l’UTAC, le LNE, l’UGE et l’IRT SystemX), focalisé sur l’utilisation de véhicules autonomes (navettes et véhicules privés) en milieu urbain.
 300x250px.png)