
C’est à l’occasion du CES que LeddarTech, un spécialiste américain des technologies de détection par lidar, a dévoilé son logiciel de simulation lidar LeddarEcho qui fonctionne désormais sur le simulateur Aurelion du fournisseur de solutions de simulation et de validation dSPACE. Objectif affiché : accélérer les temps de conception des capteurs lidar embarqués dans les automobiles dotées de systèmes avancés d’aide à la conduite et de conduite autonome jusqu’aux niveaux SAE 2 (sans les mains) et 3 (sans le regard).
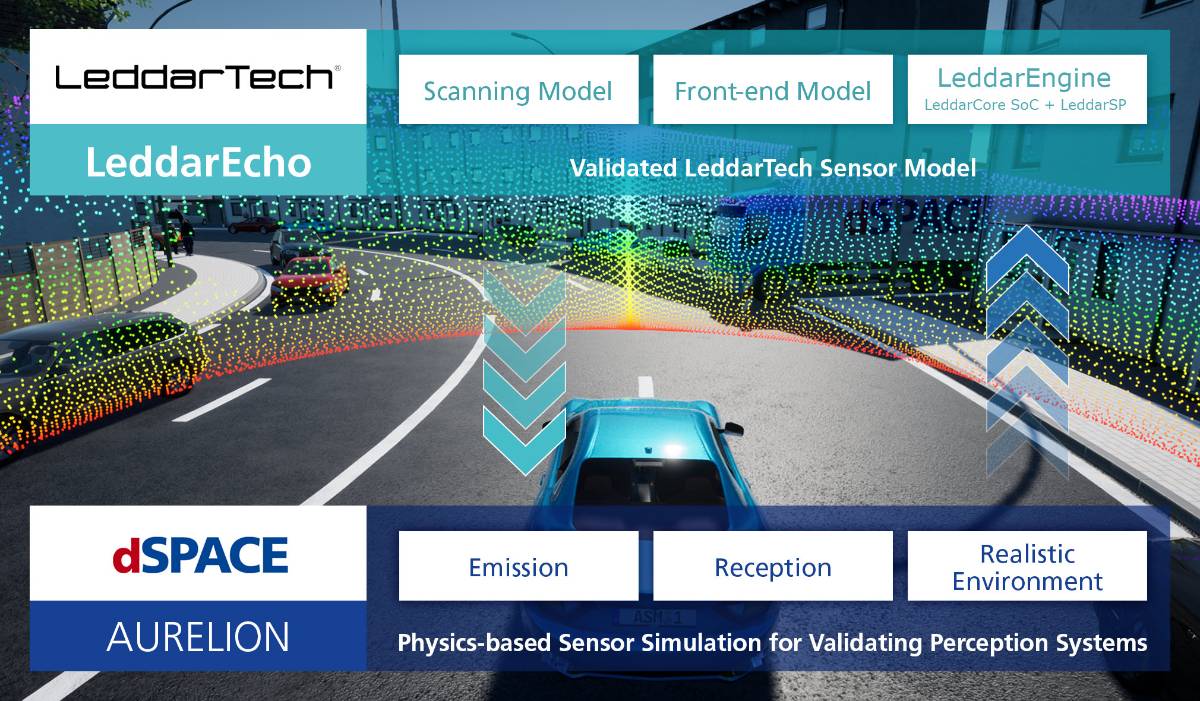
LeddarEcho fonctionne donc au moyen du simulateur de capteurs ultraréaliste Aurelion et émule le fonctionnement d’un capteur lidar frontal en restituant un modèle de haute fidélité grâce à des simulations logicielles et matérielles temps réel. Ce modèle de simulation résulte du partenariat entre les deux entreprises annoncé en décembre 2020 et qui vise à soutenir le développement des technologies lidar grâce à des outils et modèles de simulation.
 Selon dSPACE, le développement d’une plateforme de détection et de perception requiert actuellement l’intégration et la calibration du capteur lui-même sur un véhicule, ainsi que l’acquisition et l’annotation de données conventionnelles, autant de processus coûteux en matière de temps et d’argent.
Selon dSPACE, le développement d’une plateforme de détection et de perception requiert actuellement l’intégration et la calibration du capteur lui-même sur un véhicule, ainsi que l’acquisition et l’annotation de données conventionnelles, autant de processus coûteux en matière de temps et d’argent.
Avec le logiciel de simulation lidar LeddarEcho, les utilisateurs pourront simuler différents concepts et combinaisons de capteurs et valider les exigences de conception sans devoir assembler le système au complet, donc sans avoir recours à du matériel, ni à de la collecte et aux annotations fastidieuses des données. De plus, en fournissant les données issues des modèles de simulation, l’outil facilite le développement d’un système global de perception, depuis le choix des capteurs et l’architecture de la plateforme jusqu’à l’acquisition et l’annotation de données.
La fonctionnalité essentielle pour ces tâches est fournie par le système de simulation Aurelion qui réalise des modélisations de prototypes de capteurs complexes fondés sur la physique et qui génère des visualisations “photoréalistes”.
"Cette validation comprend la simulation rigoureuse du lidar et de l’environnement du véhicule, y compris des objets en mouvement comme d'autres véhicules et les piétons, et d'autres objets statiques comme les panneaux de signalisation et les bordures de trottoir", précise Christopher Wiegand, responsable des produits stratégiques chez dSPACE.






 300x250px.png)