
[APPLICATION SPEEDGOAT] La transition vers la mobilité électrique est en train de transformer l'ingénierie automobile dans de nombreux domaines. Dans les groupes motopropulseurs des véhicules électriques, les progrès en matière de rendement, de rapidité de charge et de sécurité fonctionnelle reposent de plus en plus sur des avancées étroitement liées dans les domaines de l'électronique de puissance, des systèmes de batteries et des logiciels embarqués. A ce niveau, un couplage étroit entre jumeaux numériques, plateformes HIL en temps réel et flux de travail orientés CI influence la structuration des environnements de test, comme l'explique ici Speedgoat (*).
 Auteur : Daniel Fonte
Auteur : Daniel Fonte
HIL Application Specialist
Head of Application Engineering chez Speedgoat
Dans le domaine de l'électronique de puissance, les ingénieurs ont recours à des semi-conducteurs à large bande interdite, tels que le carbure de silicium (SiC) et le nitrure de gallium (GaN), pour autoriser des fréquences de commutation plus élevées et réduire les pertes.
Parallèlement, les architectures des batteries et des véhicules évoluent de 400 V à 800 V et au-delà pour permettre une charge plus rapide et d'atteindre une densité de puissance plus élevée. Dans tous ces domaines, la complexité des logiciels ne cesse de croître, avec des algorithmes de commande de plus en plus sophistiqués qui gèrent les batteries, les moteurs, les onduleurs et les systèmes de charge.
Ces tendances modifient les priorités en matière d'ingénierie et de validation au sein du groupe motopropulseur des véhicules électriques. A mesure que des tensions plus élevées, des dispositifs de commutation plus rapides et des logiciels de contrôle plus sophistiqués se combinent, le comportement critique du système est déterminé par cette interaction.
De plus, les essais haute tension comportent des risques inhérents pour la sécurité, les cycles complets de charge et de décharge peuvent durer plusieurs heures, et la reproduction de conditions de défaillances rares mais critiques pour la sécurité sur du matériel réel est à la fois coûteuse et peu pratique.
Les tests HIL incontournables
A mesure que les cycles de développement se raccourcissent et que le contrôle réglementaire s'intensifie, les équipes d'ingénierie se tournent vers de nouvelles approches permettant une vérification et une validation plus précoces, plus rapides et plus sûres.
Dans ce cadre, les tests HIL (Hardware-in-the-Loop) sont désormais bien implantés dans l'ingénierie automobile et jouent aujourd'hui un rôle central dans la validation des groupes motopropulseurs des véhicules électriques. En associant le matériel physique testé avec des simulations en temps réel du système environnant, le HIL fait le lien entre la simulation sur ordinateur et les tests physiques complets.
Pour les équipes d'ingénierie, cette solution réduit les cycles de développement tout en tenant compte des contraintes liées à l'augmentation des tensions, à l'accélération des dispositifs de commutation et à la généralisation du contrôle défini par logiciel. Elle facilite en outre l'intégration dans les flux de travail de validation automatisés et les environnements d'intégration continue (continuous integration, CI).
Des modèles aux jumeaux numériques pour relever le niveau de la fidélité
Les jumeaux numériques (digital twins) occupent depuis longtemps une place centrale dans les tests HIL. Dans les groupes motopropulseurs électriques, leur rôle prend de l'ampleur, la validation s'étendant de plus en plus à de multiples domaines physiques et scénarios de fonctionnement.
Les systèmes de véhicules électriques exigent désormais des solutions de jumeaux numériques qui combinent les comportements électrique et thermique, capturent la dynamique de commutation rapide de l'électronique de puissance et réduisent la dépendance à des équipements physiques coûteux, lents ou dangereux à tester.
L'évolution des normes de charge et des flux d'énergie bidirectionnels accroît également le besoin d'émulation de protocoles et de tests d'interopérabilité au niveau système, dans le cadre desquels les interactions entre les chargeurs embarqués, les convertisseurs de puissance et l'infrastructure de charge doivent être validées au plus tôt.
 Les jumeaux numériques HIL actuels doivent donc reproduire un flux de puissance réaliste, un couplage multi-domaine et un comportement conforme aux normes afin de permettre une vérification efficace du groupe motopropulseur du véhicule électrique. Les environnements fondés sur des modèles, tels que Simulink de MathWorks et les bibliothèques de modélisation physique associées, permettent le développement de modèles de systèmes haute fidélité réutilisables tout au long du cycle de développement.
Les jumeaux numériques HIL actuels doivent donc reproduire un flux de puissance réaliste, un couplage multi-domaine et un comportement conforme aux normes afin de permettre une vérification efficace du groupe motopropulseur du véhicule électrique. Les environnements fondés sur des modèles, tels que Simulink de MathWorks et les bibliothèques de modélisation physique associées, permettent le développement de modèles de systèmes haute fidélité réutilisables tout au long du cycle de développement.
Lorsqu'ils sont déployés sur des plateformes HIL temps réel dédiées, ces jumeaux numériques peuvent fonctionner de manière déterministe à des intervalles de temps suffisamment courts pour que le contrôleur testé ne puisse pas faire la distinction entre le matériel électronique de puissance simulé et le matériel physique.
La capacité à saisir la dynamique de commutation rapide et le comportement électrique transitoire à cette résolution rend le modèle utilisable pour la validation en boucle fermée et le développement de systèmes de contrôle.
En revanche, les modèles simplifiés ou plus lents peuvent ne pas reproduire les effets dynamiques observés par le contrôleur, ce qui limite leur utilité pour des essais réalistes.
Deux systèmes critiques pour la sécurité au cœur du groupe motopropulseur électrique
Au sein du groupe motopropulseur d'un véhicule électrique, deux sous-systèmes revêtent une importance particulière du point de vue de la sécurité et de la validation: le système de batterie et le dispositif de traction.
Ces deux systèmes fonctionnent dans des conditions électriques et thermiques difficiles et s'appuient sur des logiciels embarqués pour la surveillance et le contrôle. Cependant, leur comportement physique impose des exigences de test très différentes. Les batteries, gérées par un système de gestion de batteries (BMS, Battery Management System) présentent une dynamique électrique et thermique relativement lente, avec des processus de charge et de décharge pouvant durer des heures et des conditions de défaillance difficiles, voire dangereuses, à reproduire sur du matériel physique.
En revanche, le système de propulsion - composé de l'onduleur et du moteur électrique - fonctionne avec des commutations rapides et une dynamique à haute fréquence qui nécessitent une résolution temporelle extrêmement fine pour être simulée avec précision.
Dans ce cadre, il est essentiel de bien comprendre ces différentes caractéristiques pour définir des stratégies de validation HIL efficaces.
Validation des systèmes de gestion de la batterie pour réduire les temps de test
Le système de gestion de la batterie est aujourd’hui l’un des composants les plus critiques pour la sécurité des véhicules électriques modernes. A mesure que les batteries atteignent des tensions et des densités de puissance plus élevées, le logiciel du BMS doit gérer des tâches de plus en plus complexes, notamment l’équilibrage des cellules, la gestion thermique, la détection des défauts et l’estimation précise de l’état de charge (SOC, State of Charge) et de l’état de santé (SOH, State of Health).
Bon nombre de ces estimateurs intègrent désormais des algorithmes avancés et des techniques basées sur les données. La validation physique du comportement d'un BMS est intrinsèquement un processus lent et risqué. Un seul cycle de charge et de décharge peut durer des heures, ce qui rend les tests de régression peu pratiques.
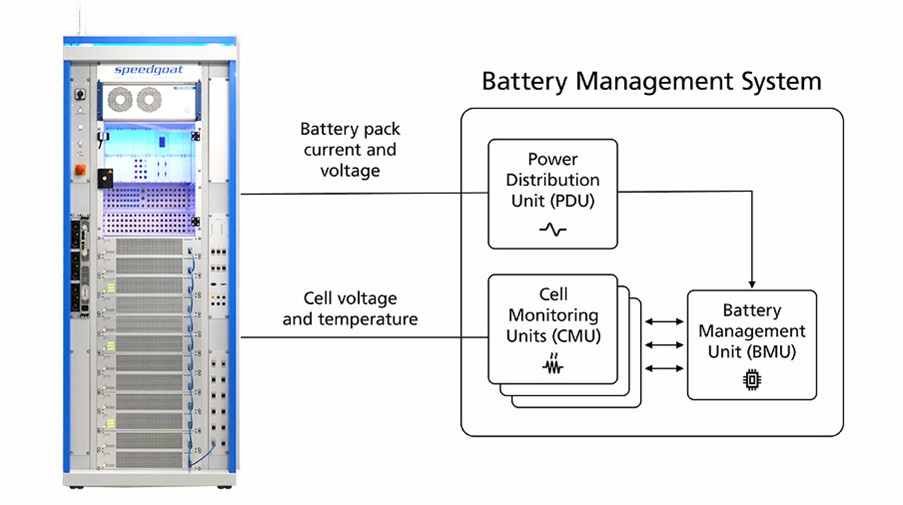
Les tests HIL permettent de relever les défis de la validation des BMS en remplaçant la batterie physique par un jumeau numérique en temps réel et un matériel d’émulation dédié au niveau des cellules. (Source : Speedgoat)
Provoquer délibérément des défauts tels que des surintensités, des surchauffes ou des courts-circuits sur du matériel de batterie réel est dangereux et peut détruire des composants coûteux. Ces contraintes limitent souvent la couverture des tests précisément là où la fiabilité est la plus cruciale. Les tests HIL répondent à ces défis en remplaçant la batterie physique par un jumeau numérique en temps réel et un matériel d'émulation dédié au niveau des cellules.
Les modules d'émulation de cellules empilables permettent ainsi aux ingénieurs de simuler des batteries complètes avec une fidélité de tension au niveau des cellules, ce qui permet ainsi au contrôleur BMS d'interagir avec une batterie virtuelle réaliste. Des modules spécifiques supplémentaires peuvent être intégrés pour émuler des capteurs de température, insérer des défauts électriques et assurer l'isolation de sécurité du contrôleur testé. Des alimentations et des dispositifs de conditionnement de signal peuvent également être utilisés pour émuler des batteries haute et basse tension et pour surveiller les courants et les tensions pendant les tests.
Les ingénieurs peuvent ainsi accélérer considérablement les cycles de test, injecter des défauts en toute sécurité et répéter les tests de manière déterministe. Ces configurations s'intègrent aux processus de sécurité fonctionnelle et permettent une validation conforme à la norme ISO 26262 sans exposer personnel et équipements à des risques inutiles.
Electronique de puissance et entraînements moteurs, chaque nanoseconde compte
Alors que le comportement des BMS s'étend sur de longues périodes, les caractéristiques des entraînements de moteurs et de l’électronique de puissance se situent à l’extrême opposé. Les onduleurs de traction et les moteurs électriques fonctionnent de plus en plus à des fréquences de commutation élevées afin d'améliorer le rendement, de réduire les pertes et de permettre des conceptions compactes.
L'utilisation de dispositifs à large bande interdite accroît encore davantage la vitesse de commutation, faisant passer les temps de réponse concernés à l'échelle des microsecondes et des nanosecondes.
Les onduleurs de traction et les moteurs électriques fonctionnent de plus en plus à des fréquences de commutation élevées afin d'améliorer le rendement, de réduire les pertes et de permettre des conceptions compactes. (Source : Speedgoat)
Afin de valider le comportement du système de commande dans ces conditions, il faut disposer de plateformes de simulation capables de capturer les événements de commutation rapides, l'ondulation du courant, l'ondulation du couple et les effets liés à la compatibilité électromagnétique.
Les performances du moteur de traction et de l'onduleur sont régies par des dynamiques électriques, thermiques et mécaniques étroitement couplées, et ces interactions doivent être représentées de manière cohérente dans le modèle du système. À elle seule, la simulation en temps réel classique fondée sur un processeur peut ne pas offrir la résolution temporelle nécessaire pour capturer avec précision le comportement de commutation à haute fréquence.
Les architectures HIL hybrides CPU-FPGA relèvent ce défi en distribuant l'exécution du modèle sur plusieurs domaines de traitement. Les éléments les plus sensibles au temps, tels que les transitions de commutation des onduleurs et les interactions PWM, peuvent être exécutés sur un FPGA avec une résolution de l'ordre de la nanoseconde, tandis que les dynamiques électriques, thermiques et mécaniques de plus haut niveau restent du ressort des processeurs multicœurs.
Cette approche coordonnée et multi-domaine préserve une exécution déterministe et un flux de puissance réaliste, permettant des tests reproductibles de scénarios critiques pour la sécurité, notamment les courts-circuits des onduleurs et autres conditions de défaillance qu'il serait dangereux de reproduire sur du matériel physique.
Lorsqu'elle est mise en œuvre dans un environnement de modélisation unifié, les ingénieurs peuvent itérer rapidement sans avoir à convertir les modèles entre différentes chaînes d'outils.
Interopérabilité et normes de recharge, à la découverte de l’inconnu
Au-delà du groupe motopropulseur, les développeurs de véhicules électriques sont confrontés à des défis croissants en matière d’interopérabilité des systèmes de recharge. L’écosystème mondial de la recharge demeure fragmenté, avec de multiples normes et variations régionales définissant les protocoles de communication ainsi que les caractéristiques de transfert de puissance, notamment la synchronisation, le séquencement et la gestion des défaillances.
Les constructeurs et équipementiers automobiles ne peuvent pas, de manière réaliste, tester la compatibilité de leurs véhicules avec toutes les configurations de bornes de recharge en se basant uniquement sur l’infrastructure physique.
Les tests HIL offrent ici une alternative pratique grâce à l'émulation de protocoles et de systèmes. En simulant les bornes de recharge, les chargeurs embarqués et les interfaces réseau électrique pertinentes, les ingénieurs peuvent valider les piles de communication, la conformité aux normes, la synchronisation, le séquencement et la gestion des défaillances dès les premières étapes du développement.
Grâce aux entrées/sorties modulaires et aux interfaces configurables, une seule configuration HIL peut être adaptée à différentes normes sans avoir à reconstruire l'ensemble du système de test. Cette approche réduit la dépendance aux infrastructures externes et permet d'identifier les problèmes d'interopérabilité avant la mise en service des véhicules.
Automatisation, intégration continue et laboratoire d'essais du futur
On le voit, à mesure que les systèmes de véhicules électriques évoluent, les tests HIL s'étendent pour inclure des processus de validation automatisés, en plus du développement et du débogage interactifs. De plus en plus, les systèmes de test HIL sont insérés dans des environnements d'intégration continue où les mises à jour logicielles peuvent déclencher automatiquement des tests de régression sur le matériel en temps réel.
Les environnements de développement basés sur des modèles facilitent cette transition en permettant l'exécution automatisée des tests, la traçabilité des exigences et la génération automatisée de rapports de résultats. Dans le domaine du développement embarqué, l'intégration continue (CI), associée aux tests automatisés, contribue à détecter plus tôt les problèmes d'intégration et réduit le risque de régressions à mesure que la complexité des logiciels de contrôle augmente.
Concrètement, les systèmes HIL modulaires montés sur rack, peuvent évoluer au rythme du programme de développement du véhicule, prenant en charge toutes les étapes, de la validation au niveau des composants aux tests système de haut niveau et aux tests de véhicules virtuels. Par conséquent, les tests HIL sont désormais introduits plus tôt dans le cycle de développement, au lieu d'être réservés aux seules phases finales de la validation.
Combinée à des modèles à haute fidélité et à une automatisation structurée, cette approche permet d'accélérer les itérations, de renforcer la confiance dans les modifications logicielles et d'assurer un développement plus sûr des systèmes de véhicules électrifiés.
(*) Speedgoat est une société suisse fondée en 2027 dont le siège social est basé à Berne. Elle est spécialisés dans les systèmes temps réel de pointe pour les tests en temps réel utilisant les outils Simulink et Simulink Real-Time de Mathworks. Ses solutions portent sur la spécification des exigences, la simulation, le prototypage rapide des commandes, la simulation HIL (Hardware-in-the-Loop) et le déploiement.


 300x250px.png)