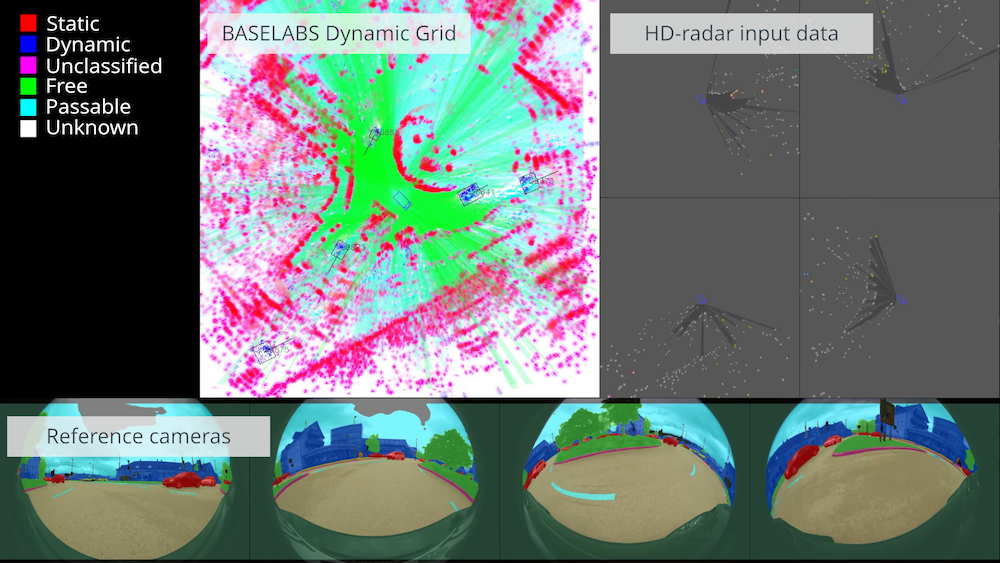
Spécialiste de la fusion de capteurs, la société allemande Baselabs (détenue à 49% par son compatriote Vector) propose avec Dynamic Grid un algorithme qui génère un modèle d'environnement cohérent à partir de données brutes fournies par des capteurs haute résolution.... L’objectif de Dynamic Grid est, selon Baselabs, d’accélérer le développement de systèmes de fusion de données pour les fonctions de conduite automatisée, en particulier dans les environnements urbains difficiles. Avec cette technologie, les développeurs du domaine automobile peuvent ainsi mettre au point des systèmes d'aide à la conduite spécifiques, tels des fonctions de stationnement, des fonctions de freinage d'urgence avec évitement automatique ou le pilotage dans les embouteillages.
Selon Baselabs, les fonctions de conduite automatisée pour les zones urbaines imposent des exigences élevées en ce qui concerne le modèle d'environnement utilisé. Côté détection, l'industrie se prépare pour ce faire à utiliser des capteurs à haute résolution pour acquérir les données requises avec un niveau de détail suffisant. A ce niveau, les méthodes algorithmiques traditionnelles de fusion de capteurs atteignent leurs limites dans un tel contexte. Avec Dynamic Grid, qui peut traiter les données brutes issues de capteurs haute résolution (radars, scanners laser, caméras avec segmentation sémantique...), il est possible de générer un modèle d'environnement qui détecte les objets dynamiques et statiques autour du véhicule avec une précision et une robustesse élevées. De plus, l’algorithme qui s'exécute en temps réel sur les processeurs automobiles, conformément à la norme ISO 26262 pour des fonctions de conduite au niveau d'automatisation 2, calcule l'espace libre pour identifier les zones où le véhicule peut passer ou les places de stationnement libres.
« Avec Dynamic Grid, nous présentons une alternative supérieure à l'utilisation combinée de méthodes de suivi traditionnelles et d'une grille d'occupation statique, explique Norman Mattern, responsable du développement produit chez Baselabs. En traitant les données de manière intégrée dans un algorithme autonome, nous évitons les incohérences qu'implique la combinaison de deux méthodes différentes dans l'approche traditionnelle. Ainsi, l’algorithme montre ses points forts dans des scénarios avec de nombreux objets et différentes directions de mouvement dans l'environnement du véhicule, situations que l’on trouve en milieu urbain. »



 300x300px.png)