En introduisant la boîte à outils Robotics System Toolbox dans la version 2015a de ses outils phares Matlab et Simulink, l’éditeur MathWorks confirme son intérêt envers ce domaine d’activité en pleine évolution. ...L’objectif de la Robotics System Toolbox est de favoriser les travaux d’intégration et de test d’algorithmes de contrôle de robots au sein d'applications basées sur la bibliothèque de programmes et le système d’exploitation open source ROS (Robot Operating System), disponible sous licence BSD. Via des algorithmes sur étagère, destinés à développer des applications robotiques autonomes mobiles, et grâce au support de plates-formes matérielles dédiées à la robotique, la boîte à outils de MathWorks garantit l'intégration entre Matlab, Simulink et ROS.
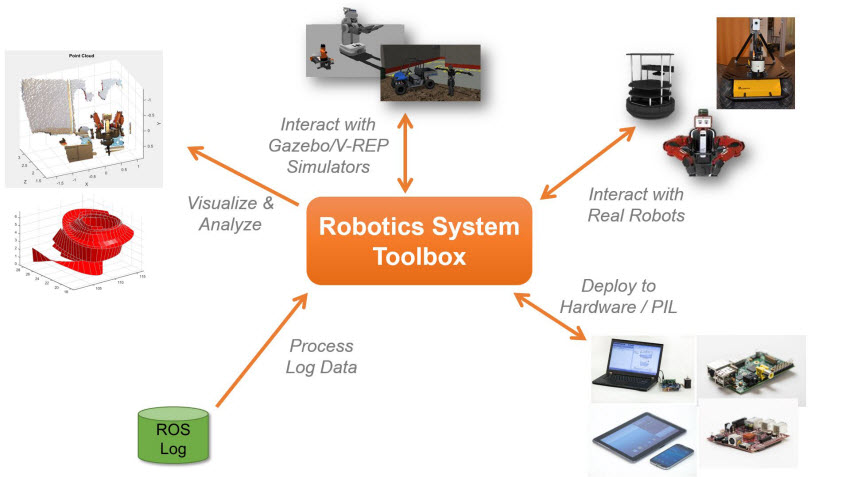
En d‘autres termes, les ingénieurs et chercheurs en robotique pourront désormais travailler dans un environnement de conception unique et intégré pour concevoir, tester et déployer des algorithmes de robotique sur des robots utilisant ROS : contrôle/commande de moteurs, programmation de systèmes de vision, codage de machines d’états… Ils pourront aussi réaliser des simulations avec des simulateurs dédiés tels que Gazebo et V-REP. Parmi les algorithmes proposés au sein de la boîte à outils Robotics System Toolbox, on trouve notamment un logiciel de représentation cartographique et des logiciels de gestion de déplacements (path planning). L’outil permet enfin de générer un nœud ROS à parti d’un modèle Simulink et de déployer un réseau de noeuds ROS via la génération automatique de code C/C++.
Parallèlement, pour encourager les développements de robots et accompagner cette évolution, MathWorks a décidé de réitérer en 2015 son engagement envers la compétition de programmation robotique Mission On Mars Robot Challenge, fort du succès de la 1ère édition organisée en 2014 lors de Maker Faire Paris. Rappelons que cette compétition a pour objectif de faire concourir des équipes d’ingénieurs, de chercheurs ou d’étudiants dans la programmation d’un robot Rover, construit à partir de cartes open source Arduino et Raspberry Pi pour explorer la planète Mars. Il ne s’agit pas ici de construire un robot, puisque le Rover, imprimé en 3D, est fourni aux équipes, mais d’optimiser les algorithmes Matlab et Simulink utilisés par les différentes équipes pour réaliser une mission d’exploration de la planète Mars (fictive) rapide et intelligente (découverte de site, évitement d’obstacles non connus à l’avance...) .
Les préqualifications s'effectueront début juin et la finale aura lieu lors du salon robotique Innorobo qui se déroulera à Lyon début juillet. Les renseignements pratiques et les modalités d’inscription sont accessibles ici.



 300x300px.png)