Comment l’Ethernet accélère la transition vers les véhicules définis par logiciel[APPLICATION TEXAS INSTRUMENTS] Une architecture en zones et l’Ethernet représentent l’avenir des réseaux dans les véhicules. Cependant, les nouvelles fonctionnalités des véhicules, ainsi que la transition vers le regroupement des capteurs et des actionneurs au sein de modules de contrôle zonal, nécessitent un réseau de communication embarqué à haut débit et à faible latence. A ce niveau, une architecture en zones mettant en œuvre l’Ethernet favorise l’essor des véhicules définis par logiciel.
Systems manager, Body Electronics & Lighting Texas Instruments La plupart des véhicules sont aujourd’hui conçus en utilisant un type d’architecture de câblage et d’unités de contrôle électronique (ECU, Electronic Control Unit) appelé architecture en domaine. Concrétement, une architecture en domaine catégorise les ECU en domaines basés sur des fonctions spécifiques, quel que soit leur emplacement dans le véhicule. Contrairement à une architecture en domaine, une architecture en zones organise la communication, la distribution d’énergie et le contrôle de charge en fonction de l’emplacement plutôt que de la fonction. Un module de contrôle zonal se comporte comme un pont pour les données réseau entre le système informatique du véhicule et les nœuds périphériques locaux tels que les capteurs intelligents et les ECU. Afin de réduire le câblage dans le véhicule, un module de contrôle zonal assure également la distribution de l’énergie aux différents nœuds périphériques - en mettant en œuvre notamment des capacités de fusible intelligent à semi-conducteur -gérel’informatique de bas niveau et pilote des charges locales telles que les moteurs et l’éclairage.
Exemple d’architecture en zones
Les modules de contrôle zonal transfèrent les données de divers capteurs et ECU à travers un réseau de communication “edge-node” et transmettent les données combinées des capteurs au système informatique central via la communication sur le réseau dorsal. De la même manière, les modules de contrôle zonal transfèrent les données reçues du système informatique central à divers actionneurs, également via la communication sur le réseau dorsal et via un réseau de communication edge-node. Cette communication bidirectionnelle entre le système informatique central et les modules de contrôle zonal nécessite une dorsale de communication à large bande et à faible latence afin de gérer la grande quantité de données générées par des fonctions telles que les multiples capteurs des systèmes d'aide à la conduite avancés (ADAS), la commande de déplacement de véhicule et les phares adaptatifs. Exigences de bande passante dans une architecture en zones Pour comprendre la valeur liée à l’utilisation de l’Ethernet dans les véhicules, analysons son utilisation en fonction des applications. Récemment défini par les normes IEEE 802.3cg (10 Mbit/s), IEEE 802.3bw (100 Mbit/s), IEEE 802.3bu (1 Gbit/s) et IEEE 802.3ch (10 Gbit/s) de l'IEEE ( l’Institute of Electrical and Electronics Engineers), l’Ethernet à paire unique prend en charge des débits compris entre 10 Mbit/s et 10 Gbit/s. Toutes ces nouvelles technologies Ethernet fonctionnent sur un câble à paire unique et peuvent communiquer sur des distances allant jusqu’à 15 mètres, ce qui est suffisant pour couvrir la plus longue liaison dans un véhicule. L’Ethernet peut également permettre la synchronisation temporelle des données des capteurs en utilisant le “time stamping” selon la norme IEEE 802.1AS en vue d'obtenir une faible latence. Cependant, bien que l’Ethernet soit capable de vitesses extrêmement rapides, celles-di ne sont pas nécessaires dans tous les contextes. Par exemple, communiquer avec le module de commande de porte ou le module de chauffage, de ventilation et de climatisation ne nécessite pas un débit de 100 Mbit/s seulement. Une couche physique Ethernet à 10 Mbit/s (gérée par le circuit DP83TD555J-Q1) ou un autre protocole réseau comme le CAN (Controller Area Network (CAN) est préférable pour les cas d’utilisation à plus faible débit et moins gourmands en bande passante, tout en réservant les débits supérieurs pour l’envoi de données regroupées des caméras et des capteurs circulant des modules de contrôle zonal au système informatique central.
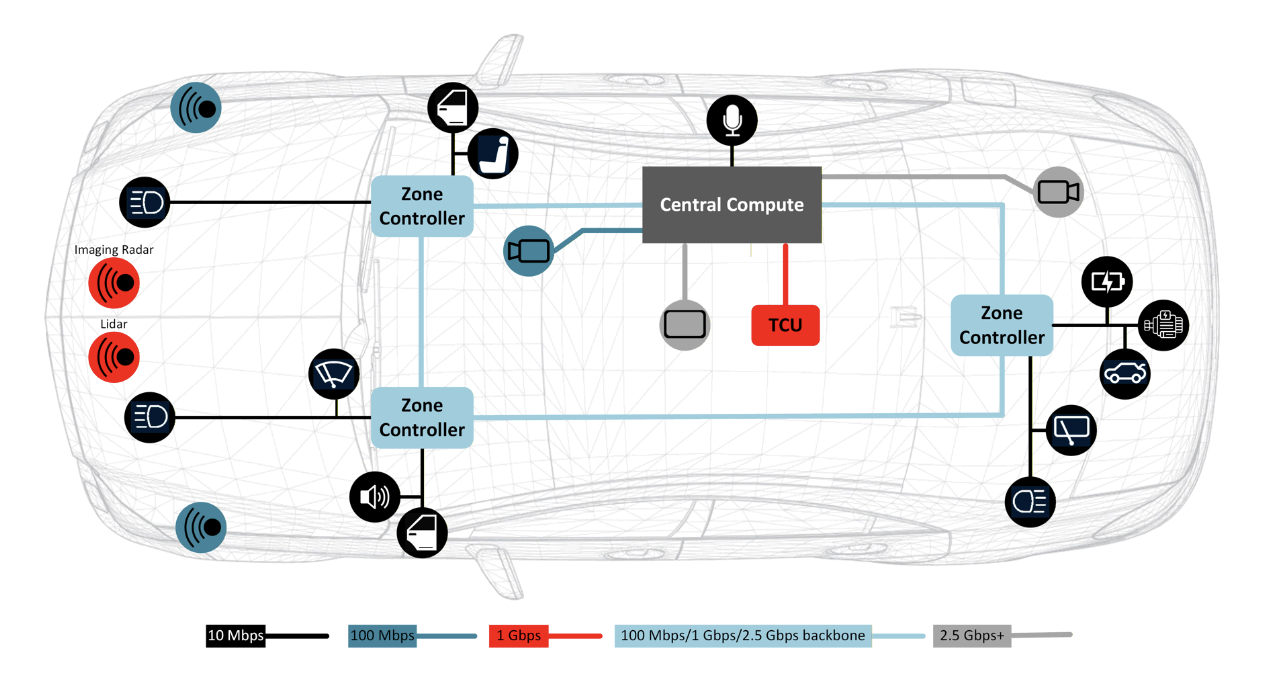
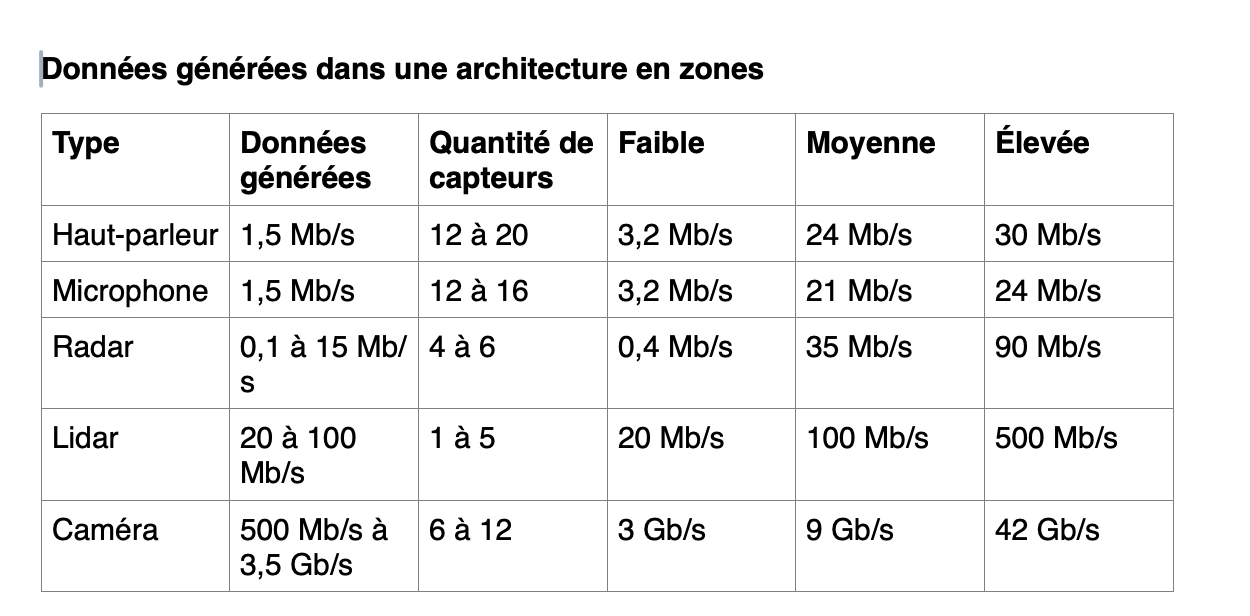
On voit ici les endroits où utiliser différentes vitesses d’Ethernet dans une architecture en zones Lorsque les puces-systèmes (SoC) du radar ou du lidar traite les données, celles-ci sont généralement transmises à travers un bus CAN, un bus Ethernet à 10 Mbit/s ou 100 Mbit/s vers le module de contrôle zonal. Lorsque seul un traitement des données de premier ou de second niveau est effectué, des liaisons Ethernet de 100 Mbit/s à 1 Gbit/s sont utilisées pour transmettre les données radar et lidar vers le module zonal ou l’ordinateur central. L’envoi de données lidar ou radar brutes vers un système informatique central en vue de leur traitement extraira donc davantage d’informations grâce à la fusion des données provenant de différents capteurs. La transmission de telles quantités de données brutes exige alors une bande passante plus large, généralement un protocole sérialiseur/désérialiseur (SerDes) ou Ethernet à 2,5 Gbit/s ou plus. Pour les caméras, les technologies SerDes comme le FPD-Link (Flat Panel Display-Link) constituent le protocole le plus approprié lorsqu’un niveau accru de données pour des voitures dotées d’un système Adas (Advanced Driver Assistance System) nécessite l’ensemble des données brutes provenant de la caméra frontale pour le post-traitement. S’il est possible de compresser les données de la caméra avant et qu'il n'y a pas besoin de ce niveau accru de données Adas une connexion Ethernet à 100 Mbit/s constitue une alternative. Les modules du domaine carrosserie tels que les capteurs de poignée de porte, les modules de commande des lève-vitres et les modules de commande des rétroviseurs latéraux utilisent généralement les protocoles CAN et LIN (Local Interconnect Network) pour communiquer, car aucun ne nécessite une large bande passante. Bien que les concepteurs continueront d’utiliser CAN et LIN, l’utilisation accrue de l’Ethernet dans les véhicules crée également une place pour l’Ethernet multidrop 10BASE-T1S à 10 Mbit/s. CAre si m’Ethernet est traditionnellement une topologie point à point, l’Ethernet 10BASE-T1S est la première norme Ethernet autorisant un fonctionnement sur une topologie en bus. L’Ethernet multigigabit dans une architecture en zones Comment l’architecture en zones pourrait-elle évoluer ? Cela commence par l’agrégation des données du domaine carrosserie, l’intégration de la distribution d’énergie et la centralisation du calcul. Au fil du temps, les architectures en zones commenceront à agréger des données provenant d’autres domaines tels que l’ADAS et l’infodivertissement. L’objectif final consiste à incorporer tous les domaines dans l’architecture en zones. Quel que soit le domaine auquel les données appartiennent, le module de contrôle zonal et le système informatique central continueront d’utiliser le même réseau de communication dorsal pour transférer les données. L’audio est un domaine privilégié pour une intégration dans les modules de contrôle zonal car il est possible de transmettre des données audio via l’Ethernet avec les normes AVB (Audio Video Bridging). Les fonctions du domaine carrosserie nécessitent généralement 10 Mbit/s ou moins. Mais, comme les fonctions Adas ou d’infodivertissement à bord telles que le radar, le lidar, l’audio et les caméras sont de plus en plus incorporées dans l’architecture en zones, les exigences en matière de débit et de bande passante doivent augmenter et/ou la topologie du réseau principal Ethernet peut passer d’une configuration en étoile à une configuration en anneau pour s’adapter à la quantité de données des capteurs critiques pour la sécurité et sensibles au temps. L’audio génère environ 1,5 Mbit/s par canal, un capteur radar génère habituellement entre 0,1 et 15 Mbit/s. Le lidar génère entre 20 et 100 Mbit/s. Les caméras sont les éléments qui génèrent le plus, entre 500 Mbit/s et 3,5 Gbit/s. Les véhicules actuels comptent généralement entre quatre et six capteurs radar, entre un et cinq capteurs lidar, entre 12 et 20 haut-parleurs, entre 12 et 16 microphones et entre six et 12 caméras.
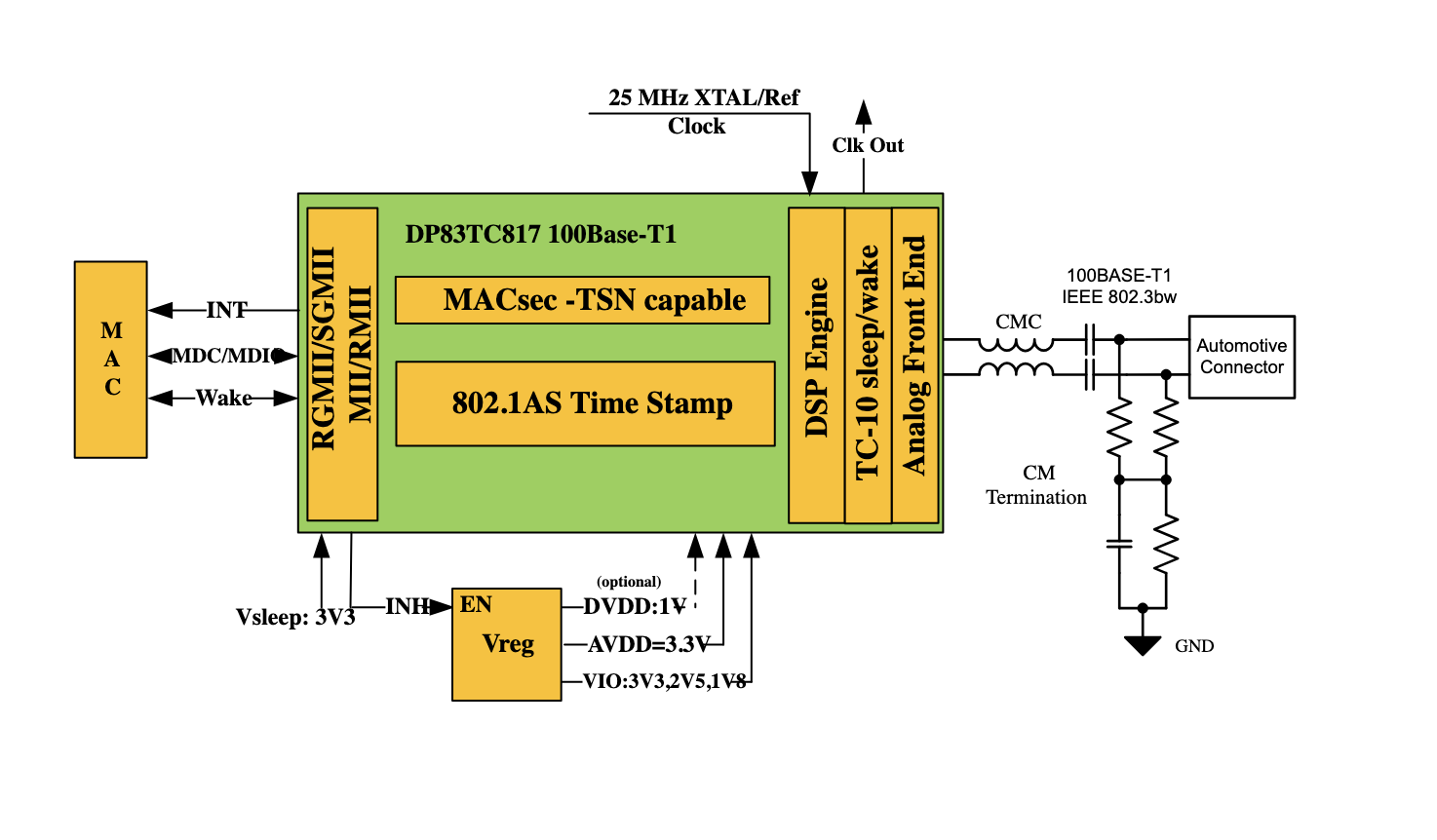
Concrétement, c’est la quantité totale de données générée qui pousse les fabricants d’équipements d’origine (OEM) à adopter l’Ethernet à 2,5 Gbit/s, 5 Gbit/s ou 10 Gbit/s. L’architecture en zones nécessite à ce niveau un réseau de communication dorsal capable de transmettre au système informatique central l’énorme quantité de données produites par les capteurs ADAS. Ainis, les données des caméras non compressées dépassent déjà les capacités actuelles de l’Ethernet, et les caméras continuent de voir leur résolution et leur nombre de pixels augmenter. Or, on le sait, alors que les véhicules poursuivent leur cheminement vers l’autonomie, le nombre de capteurs va augmenter. Par conséquent, la banque passante requise pour prendre en charge l’augmentation de la résolution des caméras et des capteurs vaaugmenter de manière proportionnelle. Les vitesses d’Ethernet demandées par les équipementiers diffèrent probablement en raison des calendriers de transition pour l’intégration de différentes fonctions dans le module de contrôle zonal. La lecture audio sur les haut-parleurs intérieurs est l’un des premiers types de données inter-domaines adoptés pour une utilisation sur le réseau dorsal Ethernet. Cela est probablement dû à une génération de données plus faible en comparaison, puisque 20 canaux audio pour haut-parleurs génèrent environ 30 Mbit/s. Un réseau dorsal Ethernet 100 Mbit/s ou 1Gbit/s existant peut facilement prendre en charge l’ajout de données pour la lecture audio.Globalement, plus les modules de contrôle zonal ont de fonctions à forte utilisation de données, plus les besoins en bande passante sont élevés. Ici, l’utilisation de l’Ethernet en tant que réseau dorsal pour une architecture en zones permet aux véhicules de transférer davantage de données sur le réseau du véhicule lors d’une connexion à l’Internet ou à des serveurs d’équipementiers distants.Ce qui permet des services par abonnement et des diagnostics du véhicule grâce à des mises à jour à distance du micrologiciel via FOTA (firmware-over-the-air). Les mises à jour via FOTA permettent différents cycles de mises à jour matérielles et logicielles, qui peuvent être asynchrones en raison de l’indépendance des capteurs et actionneurs par rapport au nœud informatique central. Une mise à jour FOTA peut également apporter de nouvelles fonctionnalités et des améliorations de sécurité, sans avoir à attendre un nouveau modèle ou à devoir amener le véhicule pour une intervention. On le voit, l’équipementier et l'utilisateur en profitent tous les deux, l’équipementier ayant le contrôle de la mise à jour du véhicule avec de nouvelles fonctionnalités après le lancement, et l'utioisateur finla étant moins dérangé par des déplacements chez un concessionnaire pour une mise à jour du micrologiciel. Les couches physiques dans une architecture en zones L’Ethernet exige l’utilisation de couches physiques (PHY) pour transmettre et recevoir des données à haut débit. Les couches physiques Ethernet pour l’automobile éliminent bon nombre des problèmes liés à l’utilisation de l’Ethernet comme colonne vertébrale du câblage des véhicules, tels que la mauvaise qualité du signal dans un environnement aussi instable Les couches physiques Ethernet de Texas Instruments peuvent fonctionner à des températures comprises entre – 40° C et + 125° C, conformément aux normes AEC-Q100 (niveau 1) de l’Automotive Electronics Council. Les PHY Ethernet doivent également respecter les normes de conformité Ethernet, garantissant le respect de certaines normes d’interopérabilité et de fiabilité concernant la compatibilité électromagnétique et les interférences électromagnétiques, ainsi que la conformité IEEE selon les spécifications des normes TC1 et TC12 de l’Open Alliance, pour fonctionner dans un environnement véhiculaire. Grâce à des fonctions de diagnostic avancées telles que l’indication de la qualité du signal, la réflectométrie dans le domaine temporel et les capteurs de décharge électrostatique, les PHY sont capables de détecter la survenue d’erreurs, d’identifier ces défauts et de permettre au système hôte de réagir de manière proactive. Par exemple, en cas de décharge électrostatique, la couche physique envoie un signal d’interruption au SoC et au Media Access Control pour les avertir de l’événement, puis vérifie d’autres composants du système. Les PHY Ethernet peuvent également réveiller des ECU distants via le câble Ethernet à paire unique en utilisant la technologie de réveil et de mise en veille de la spécification TC10 de l’Open Alliance, ce qui supprime le besoin d’un fil séparé pour sortir les ECU de leur mode veille. La norme IEEE 802.1AE Media Access Control Security (MACsec) pourrait également être une technologie importante à l'avenir pour permettre l’authentification des ECU réseau et pour chiffrer/déchiffrer les données afin de prévenir les cyberattaques, celles-ci représentant la plus grande menace pour les réseaux automobiles. Pas un mais des circuits de PHY Ethernet supplémentaires Les circuits de gestion de la coupe physique d’Ethernet PHY 100BASE-T1 - référencés DP83TC812-Q1, DP83TC815-Q1 et DP83TC814-Q1 - de Texas Instruments possèdent des fonctionnalités de nouvelle génération pour les véhicules de luxe, tandis que le circuit DP83TC813-Q1, de plus petite taille, convient plutôt aux situations dans lesquelles l’espace pour la carte de circuit imprimé est un élément primordial.
De manière générale, les circuits de gestion de la couche physique d’Ethernet (PHY Ethernet) à paire unique de TI sont conçus pour être compatible en termes d’empreinte ou de brochage (pin-to-pin) avec les PHY 100BASE-T1 et 1000BASE-T1 de TI. Ainsi, à ce niveau, une conception sur une seule carte permet de mettre à niveau les fonctionnalités ou la bande passante dans de futurs développements sans avoir à modifier le matériel. Une approche qui contribue à accélérer les cycles de développement, à satisfaire aux exigences de différents équipementiers et à réduire les délais de commercialisation, réduisant ainsi les coûts de R&D. Au-delà, les puces MAC PHY 10BASE-T1S à interface périphérique (série DP83TD555J-Q1) s’intègrent de leur côté aux réseaux dorsaux Ethernet existants, éliminant les passerelles de conversion de protocole ainsi que la latence et la surcharge de traitement associées lors de la connexion de nœuds périphériques aux réseaux CAN/LIN traditionnels. Compatible avec l’alimentation par ligne de données (Power over Data Line), ce circuit fournit à la fois l’alimentation et des données à 10 Mbit/s sur un seul câble à paire torsadée, réduisant ainsi le poids du câble et le coût du système. De plus, le mécanisme intégré d’évitement des collisions au niveau de la couche physique produit une planification déterministe avec des opportunités de transmission garanties pour chaque nœud du réseau, assurant un timing de communication prévisible. Ainis, les données utiles les plus importantes des trames Ethernet permettent d’extraire des volumes de données plus élevés et des types de données plus diversifiés depuis les ECU situées à la périphérie du véhicule, facilitant de fait les diagnostics avancés et les mises à jour à distance tout en conservant des performances en temps réel. On le voit, les progrès dans la technologie Ethernet pour l’automobile permettront à l’avenir aux constructeurs automobiles de proposer davantage de fonctionnalités et de capacités dans les nouveaux véhicules. Et dans ce cadre, une architecture en zones mettant en œuvre l’Ethernet contribuera à accélérer le passage aux véhicules définis par logiciel en fournissant la capacité de données qui soutiendra la prochaine vague de fonctionnalités autonomes – aboutissant à des véhicules plus sûrs et plus intelligents sur la route. Ressources Livre blanc intitulé "TSN in Automotive Zone Architectures: Enabling Ethernet Ring Architectures and AVB-Distributed Audio" pour découvrir comment les réseaux à contraintes temporelles améliorent la fiabilité du réseau d’un véhicule. Livre blanc intitulé "How a Zone Architecture Paves the Way to a Fully Software-Defined Vehicle" pour un aperçu supplémentaire des architectures en zones, Pour de plus amples informations sur la spécification TC10 de l’Open Alliance, consultez la note d’application "DP83TC812-Q1 TC10 System Timing Measurements" |
 Auteur : Madison Ecklund
Auteur : Madison Ecklund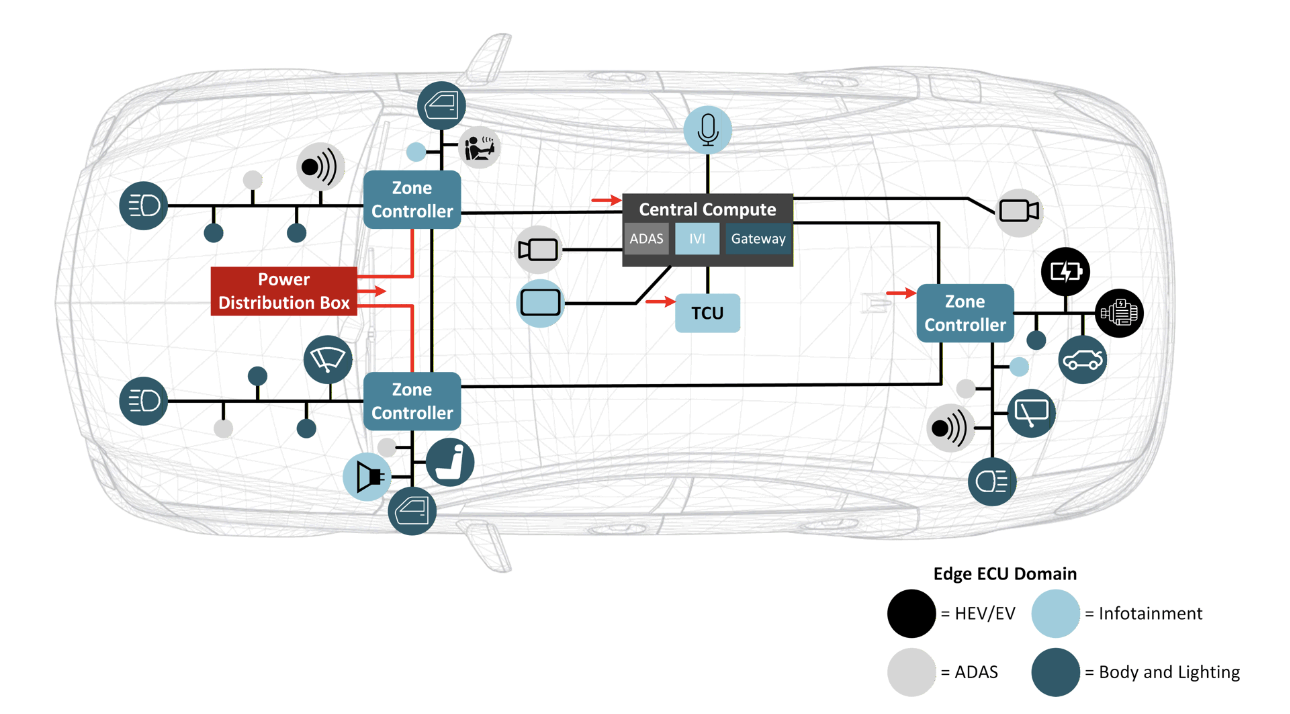
 Pour ce qui a trait aux circuits DP83TG720-Q1 et DP83TG721-Q1, ils peuvent quant à eux se connecter à des modules zonaux responsables de fonctionnalités exigeantes en termes de données comme le système informatique central et l’unité de contrôle télémétrique, laissant de la place pour l’inclusion de fonctionnalités additionnelles dans les modèles ultérieurs sans avoir à faire de changements importants au faisceau de câblage.
Pour ce qui a trait aux circuits DP83TG720-Q1 et DP83TG721-Q1, ils peuvent quant à eux se connecter à des modules zonaux responsables de fonctionnalités exigeantes en termes de données comme le système informatique central et l’unité de contrôle télémétrique, laissant de la place pour l’inclusion de fonctionnalités additionnelles dans les modèles ultérieurs sans avoir à faire de changements importants au faisceau de câblage.