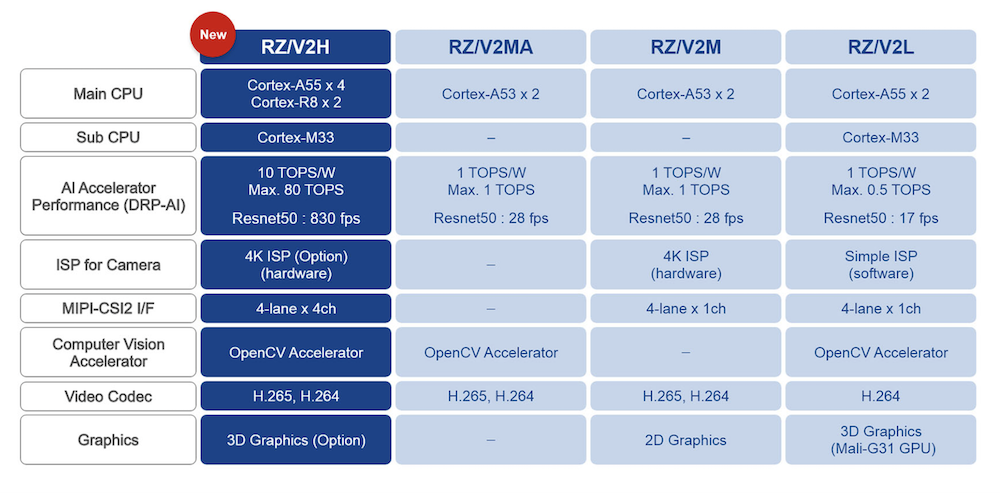
Renesas met l’IA visuelle et le contrôle temps réel au service de la robotique haut de gammeEn dévoilant son puissant processeur RZ/V2H, Renesas affirme ses ambitions dans le domaine de la robotique industrielle en intégrant au sein de cette puce des capacités de traitement d’applications d’intelligence artificielle (IA) pour la vision et un contrôle en temps réel des mouvements et déplacements. Appartenant à la famille des microprocesseurs RZ de Renesas, ce nouveau membre se destine aux applications robotiques haute performance en apportant notamment un accélérateur spécifique pour le traitement d’algorithmes IA avec une efficacité énergétique de 10 Tops/W, procurant des performances d'inférence IA allant jusqu'à 80 Tops sans recours à un ventilateur de refroidissement.
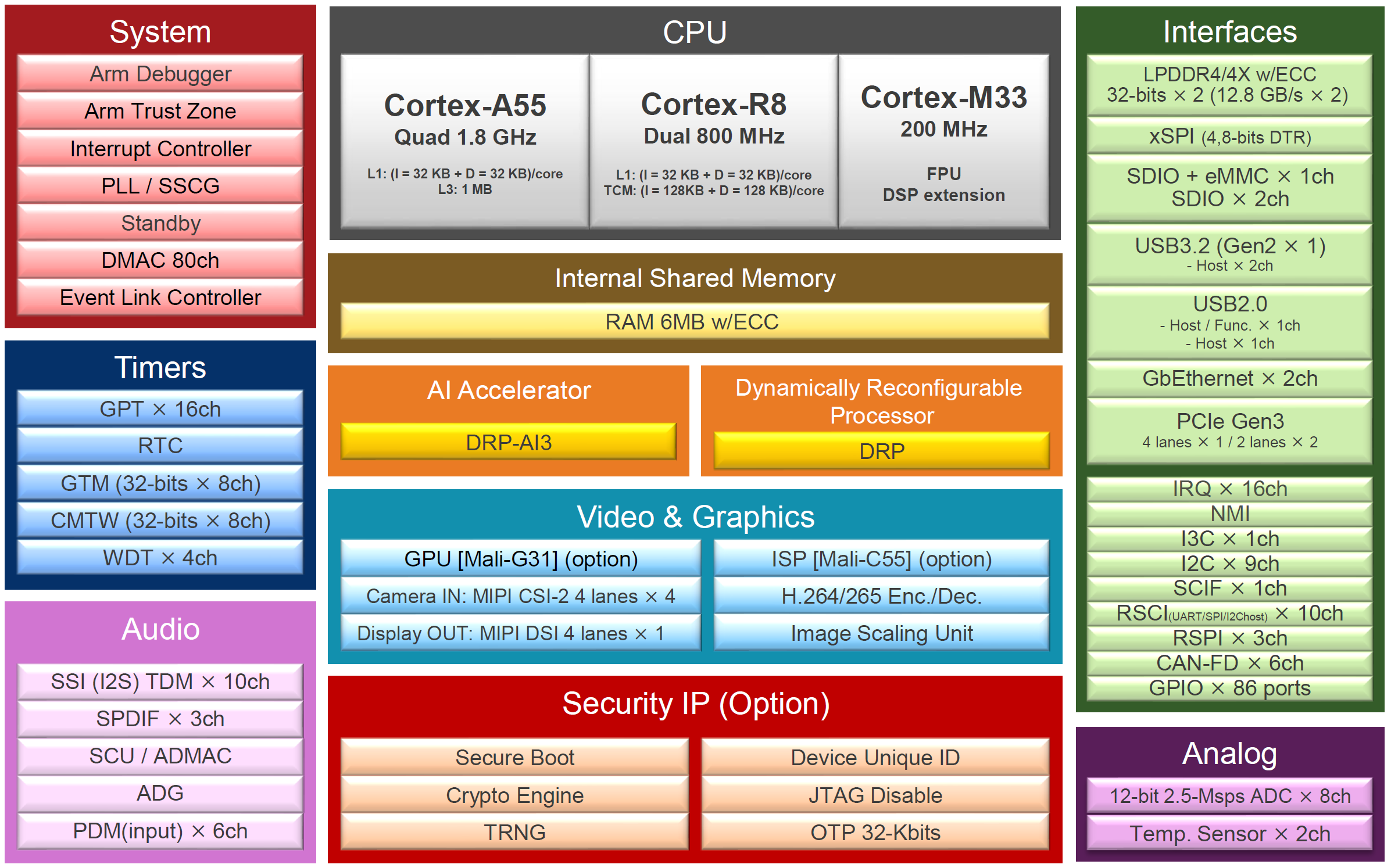
Le RZ/V2H intègre quatre cœurs Arm Cortex-A55 avec une fréquence de fonctionnement jusqu'à 1,8 GHz pour le traitement des applications Linux, deux cœurs Cortex-R8 fonctionnant à 800 MHz pour le traitement temps réel de haute performance, et un Cortex-M33 comme cœur additionnel. En intégrant ces cœurs dans une seule puce, le processeur peut gérer les tâches IA de vision et de contrôle en temps réel, ce qui le rend adapté aux applications robotiques exigeantes. De plus, selon Renesas, comme le RZ/V2H est éco-énergétique, il n'a pas besoin de ventilateurs de refroidissement ni d'autres composants de dissipation de la chaleur, autorisant les ingénieurs à concevoir des systèmes plus compacts et plus fiables. Pour la partie traitement des systèmes de vision, Renesas a choisi de s’appuyer sur sa technologie DRP pour développer un accélérateur qui améliore très fortement le traitement d'OpenCV, une bibliothèque industrielle standard en open source initialement développée par Intel et destinée au traitement temps réel de la vision industrielle. L'amélioration au niveau vitesse qui en résulte est, selon Renesas, d’un facteur 16 par rapport à un traitement réalisé par l'unité centrale. Ainsi, la combinaison du DRP-AI3 et de l'accélérateur OpenCV améliore les algorithmes de traitement d'image ainsi que ceux de l'intelligence artificielle, assurant, selon Renesas, l'exécution en temps réel et avec un rendement énergétique efficace de la technologie Visual SLAM utilisée notamment dans des applications telles que les aspirateurs robots. La technologie Visual SLAM (Simultaneous Localization and Mapping) analyse les images capturées par les caméras embarquées sur les robots et les drones et estime leur propre position tout en créant simultanément des cartes détaillées de leur environnement. Afin d’accélérer le développement d'applications sur cette architecture, Renesas a également publié AI Applications, une bibliothèque de modèles préentraînés pour divers cas d'usage, et AI SDK (Software Development Kit) pour le développement rapide d'applications IA. En exécutant ces logiciels sur la carte d'évaluation du RZ/V2H, les ingénieurs peuvent évaluer les applications IA plus tôt dans le processus de conception, même s'ils n'ont pas de connaissances approfondies en matière d'IA. Enfin signalons qu’en parallèle, Renesas propose avec la carte Visual Detection Single Board Computer l’association du processeur RZ/V2H avec des circuits intégrés de gestion de l'alimentation et des générateurs d'horloge programmables VersaClock de la société pour prendre en charge des robots industriels et des machines à faible consommation d'énergie, sans recours à un ventilateur de refroidissement supplémentaire. La plateforme a pour objet d’utiliser directement des images de caméras pour identifier l’environnement d’un robot et déterminer et contrôler ses mouvements en temps réel.
|
 Dans le détail, le processeur RZ/V2H intègre un accélérateur IA développé par Renesas, le DRP-AI3 (Dynamically Reconfigurable Processor), présenté dans sa nouvelle mouture lors de la Conférence internationale sur les circuits à semi-conducteurs ISSCC 2024 qui s’est tenue à San Francisco en début d’année. Grâce à ses performances, cet accélérateur apporte aux ingénieurs la possibilité de traiter les applications IA de vision directement sur les robots ou sur des équipements de périphérie de réseau (edge), sans dépendre de plateformes installées dans le cloud.
Dans le détail, le processeur RZ/V2H intègre un accélérateur IA développé par Renesas, le DRP-AI3 (Dynamically Reconfigurable Processor), présenté dans sa nouvelle mouture lors de la Conférence internationale sur les circuits à semi-conducteurs ISSCC 2024 qui s’est tenue à San Francisco en début d’année. Grâce à ses performances, cet accélérateur apporte aux ingénieurs la possibilité de traiter les applications IA de vision directement sur les robots ou sur des équipements de périphérie de réseau (edge), sans dépendre de plateformes installées dans le cloud.