Robotique : Nvidia apporte sa contribution auprès des développeurs d’applications sous l'environnement ROS 2Nvidia annonce une initiative pour fournir une suite de technologies logicielles de perception à la communauté des développeurs ROS, et ce à travers un accord avec la société Open Robotics. Objectif : faciliter le travail des développeurs ...cherchant à incorporer une vision par ordinateur évoluée et des fonctions d’intelligence artificielle et d’apprentissage automatique au sein de leurs applications robotiques reposant sur l'environnement robotique ROS 2. Plus concrètement, il s‘agit d’accélérer les performances de ROS 2 sur la plate-forme Jetson Edge AI de Nvidia et les systèmes bâtis sur des processeurs graphiques (GPU) de la société et de permettre une interopérabilité entre l’environnement de simulation Ignition Gazebo d'Open Robotics et l’application de simulation robotique Isaac Sim de Nvidia, disponible sur la plate-fome collaborative dans le cloud Omniverse de l'Américain.
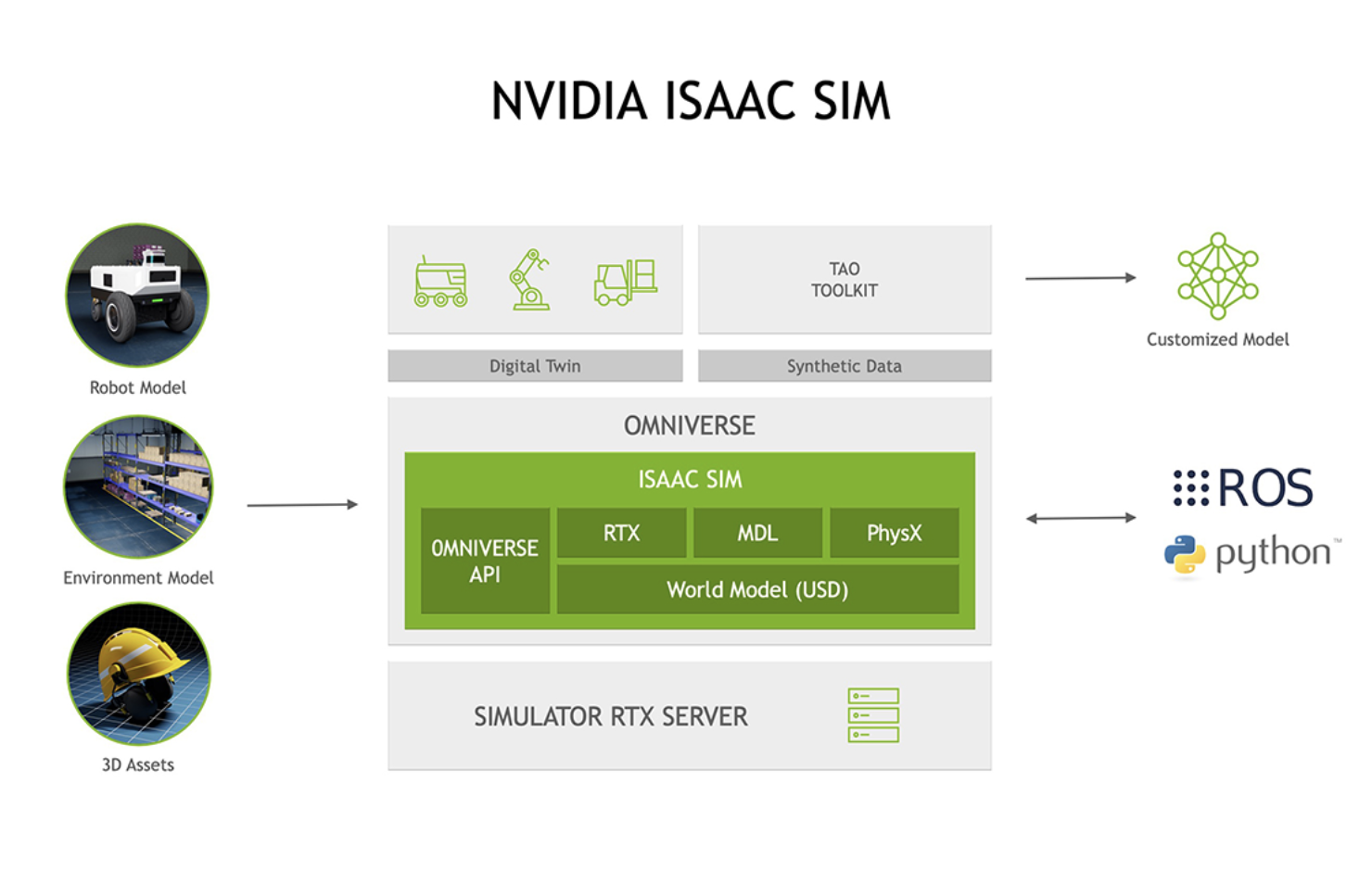
En plus des améliorations pour le déploiement d'applications robotiques sur Jetson, Open Robotics et Nvidia travaillent aussi ensemble pour intégrer les outils Ignition Gazebo et Isaac Sim, ce dernier prenant déjà en charge les systèmes ROS 1 et 2 prêts à l'emploi. Avec les deux simulateurs connectés, les développeurs ROS pourront ainsi à l’avenir aisément déplacer leurs robots et leur environnements entre les plates-formes Ignition et Isaac Sim pour exécuter des simulations à grande échelle et tirer parti des fonctionnalités avancées de chaque simulateur, telles que la dynamique haute fidélité, les modèles de détection précis et le rendu photoréaliste pour générer données synthétiques pour le test de modèles d'IA. « Alors que de plus en plus de développeurs ROS exploitent des plates-formes matérielles contenant des capacités de calcul supplémentaires conçues pour soulager le processeur hôte, ROS évolue pour faciliter l'exploitation efficace de ces ressources matérielles avancées, précise Brian Gerkey, le CEO d'Open Robotics. Dans ce cadre, travailler avec Nvidia et son expérience dans l'IA et l'innovation robotique apportera des avantages significatifs à l'ensemble de la communauté ROS. Car, au fond, tout ce qui se meut deviendra autonome, et tout ce qui est autonome nécessitera une perception avancée en temps réel de l'environnement. » Les logiciels opérationnels issus de cette collaboration devraient être disponibles au printemps 2022. |
 Selon Nvidia, la plate-forme Jetson est d’ores et déjà largement adoptée par les roboticiens dans un large éventail d'applications. Cette collaboration avec Open Robotics améliorera ROS 2 afin d'assurer une gestion efficace du flux de données et de la mémoire partagée entre les GPU et les autres processeurs présents sur Jetson. Ce qui, selon la société, améliorera grandement les performances des applications qui doivent traiter en temps réel des données à large bande passante provenant de capteurs tels que des caméras et des lidars.
Selon Nvidia, la plate-forme Jetson est d’ores et déjà largement adoptée par les roboticiens dans un large éventail d'applications. Cette collaboration avec Open Robotics améliorera ROS 2 afin d'assurer une gestion efficace du flux de données et de la mémoire partagée entre les GPU et les autres processeurs présents sur Jetson. Ce qui, selon la société, améliorera grandement les performances des applications qui doivent traiter en temps réel des données à large bande passante provenant de capteurs tels que des caméras et des lidars.