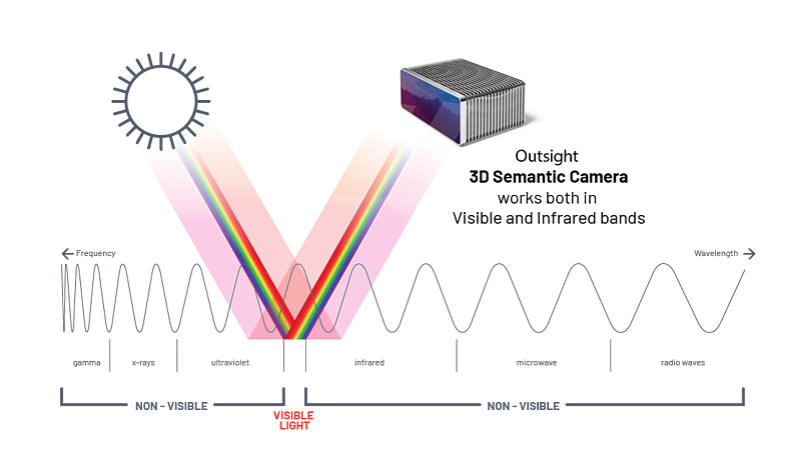
Voiture autonome : une caméra 3D “sémantique” repousse les limites de la perception de l'environnementPrésentée à la manifestation AutoSens (Automotive Sensor and Perception Conference & Exhibition) qui s’est tenue à Bruxelles du 17 au 19 septembre, la caméra dite “3D sémantique” du français Outsight a pour ambition de redéfinir la compréhension de l’environnement d’un véhicule en lui apportant une vision intelligente et discriminante en 3D et en temps réel.... Selon la société, pour la première fois l'ensemble des technologies qui fournissent une perception de l’environnement et les techniques de traitement pour sa compréhension sont intégrés dans un seul équipement. Une architecture tout-en-un capable d’être industrialisée à grande échelle (grâce au développement d’une puce-système SoC) et qui perçoit et comprend simultanément l'environnement à des centaines de mètres, y compris les éléments clés de la composition chimique des objets (peau, coton, glace, neige, plastique, métal, bois...). Analyse dans le visible et le proche IR Cette approche s’appuie en particulier sur le développement d'un laser large bande, basse consommation et longue portée qui travaille dans la bande visible du spectre lumineux et dans le proche infrarouge (SWIR, Short Wave InfraRed) entre 1 et 2,5 μm de longueur d’onde. Une bande d’analyse qui, de par sa proximité avec le visible, permet de faire de l’imagerie classique et en même temps permet d’acquérir des informations non détectables à l'oeil nu, comme la composition des matériaux. Sur la solution d’Outsight, cette opération est réalisée via une analyse hyperspectrale active. Celle-ci est combinée à une technologie 3D SLAM (Simultaneous Localization and Mapping) gérée sur un seul et même circuit intégré. La technique 3D SLAM est couramment utilisée par les marchés de la robotique, des drones, de la téléphonie mobile et de l’automobile pour créer et/ou actualiser automatiquement des cartographies d’un environnement inconnu. Le 3D SLAM est aussi utilisé pour les opérations de repérage dans l’espace (inside-out tracking).
Dans la solution proposée par le Français, l’incertitude statistique est également éliminée grâce à une "mesure" effective en temps réel des objets (détection instantanée de piétons et de cyclistes par exemple). L’ensemble délivre la position, la taille et la vélocité de tous les objets en mouvement dans l’environnement avec des informations additionnelles sur la nature des matériaux analysés, afin de mieux planifier le trajet du véhicule et optimiser les prises de décision. Par exemple, la caméra 3D sémantique fournit des données sur l'état des routes et peut, par exemple, identifier du verglas, faire la différence entre la neige et la glace, etc. Des marchés au-delà de l'automobile Outsight a déjà entamé des programmes de développement conjoints avec des équipementiers et des fournisseurs de premier plan sur les marchés de l'automobile, de l'aéronautique et de la sécurité/surveillance et ouvrira progressivement cette technologie à d'autres partenaires au cours du premier trimestre 2020.
« Notre caméra 3D sémantique est non seulement capable de résoudre les problèmes actuels liés à la sécurité au volant, mais apporte également des fonctionnalités inédites dans d’autres marchés comme la gestion d’infrastructures, explique Raul Bravo. En étant en mesure de dévoiler toute la réalité d’un environnement réel, en fournissant des informations jusque-là invisibles, nous sommes convaincus que de nouveaux domaines d'application vont voir le jour. » |
 La technologie globale d’Outsight est ainsi en mesure de dévoiler en temps réel une réalité visible et invisible à l'œil humain en fournissant des informations directement exploitables. Et ce via la classification des objets repérés, opération réalisée sur une puce-système sans recours à un algorithme d'apprentissage automatique classique (qui s’appuie sur l’exploitation de bases de données massives pour l’apprentissage). L'approche s'avérerait donc peu gourmande en énergie et n’utiliserait que la bande passante strictement nécessaire.
La technologie globale d’Outsight est ainsi en mesure de dévoiler en temps réel une réalité visible et invisible à l'œil humain en fournissant des informations directement exploitables. Et ce via la classification des objets repérés, opération réalisée sur une puce-système sans recours à un algorithme d'apprentissage automatique classique (qui s’appuie sur l’exploitation de bases de données massives pour l’apprentissage). L'approche s'avérerait donc peu gourmande en énergie et n’utiliserait que la bande passante strictement nécessaire.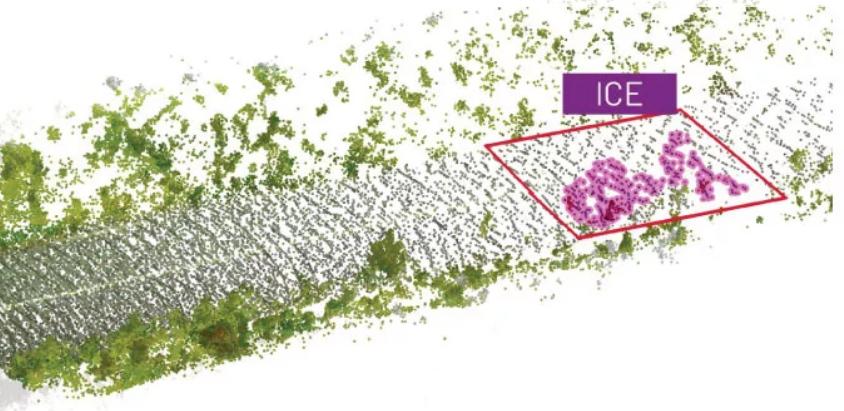 Rappelons qu'Outsight est une nouvelle entité née récemment de l’évolution de la société Dibotics qui développe des solutions de traitement de données 3D en temps réel. Les fondateurs d’Outsight, Raul Bravo, cofondateur et CEO de l’ancienne société Dibotics, et Cedric Hutchings, cofondateur de Withings et ancien VP de Nokia Technologies, se sont associés pour créer Outsight qui vise à combiner les actifs logiciels de Dibotics avec une technologie innovante de capteur 3D. En collaboration avec le cofondateur de Dibotics Oliver Garcia et Scott Buchter, fondateur de Lasersec, les quatre entrepreneurs ont réuni une équipe internationale d'ingénieurs et scientifiques de haut niveau à Paris, San Francisco et Helsinki pour développer cette technologie de reconnaissance visuelle.
Rappelons qu'Outsight est une nouvelle entité née récemment de l’évolution de la société Dibotics qui développe des solutions de traitement de données 3D en temps réel. Les fondateurs d’Outsight, Raul Bravo, cofondateur et CEO de l’ancienne société Dibotics, et Cedric Hutchings, cofondateur de Withings et ancien VP de Nokia Technologies, se sont associés pour créer Outsight qui vise à combiner les actifs logiciels de Dibotics avec une technologie innovante de capteur 3D. En collaboration avec le cofondateur de Dibotics Oliver Garcia et Scott Buchter, fondateur de Lasersec, les quatre entrepreneurs ont réuni une équipe internationale d'ingénieurs et scientifiques de haut niveau à Paris, San Francisco et Helsinki pour développer cette technologie de reconnaissance visuelle.