AEye redéfinit la résolution, la portée et la fréquence d'image des lidars automobiles{EDITION ABONNES] Créée en 2013, la firme californienne AEye, qui a conçu un sous-un système de détection lidar à semi-conducteurs, propose de nouvelles mesures pour évaluer les performances de ces systèmes de télédétection par laser mis en oeuvre dans les automobiles à conduite automatisée. ...Selon la jeune entreprise qui propose un livre blanc publié en ligne, beaucoup de sociétés impliquées sur ce marché des lidars reconnaissent que les mesures conventionnelles de fréquence d'image, de résolution angulaire et de portée de détection actuellement utilisées pour évaluer les performances de ces instruments ne sont plus satisfaisantes... car elles ne mesurent pas l'efficacité des capteurs. Pour répondre à cette problématique, AEye propose trois nouvelles métriques étendues pour l’évaluation des lidars : le taux de revisite d’objets dans l'image (intra-frame object revisit rate), la résolution instantanée (instantaneous enhanced resolution) et la plage de classification des objets (object classification range). Toujours selon AEye, les capteurs lidar de première génération recherchent passivement une scène et détectent des objets à l'aide de motifs de balayage fixes dans le temps et dans l'espace, sans possibilité d'améliorer les performances avec une révision rapide de la scène, ni d'appliquer une résolution supplémentaire aux zones présentant de l’intérêt (surface de la route, intersections…). Une nouvelle classe de capteurs lidar à semi-conducteurs permet justement ce type de capture intelligente d'informations qui étend les capacités d’un lidar et permet de passer de d’une situation de recherche passive de détection d'objets à de la recherche active avec notamment la possibilité de classification des objets.
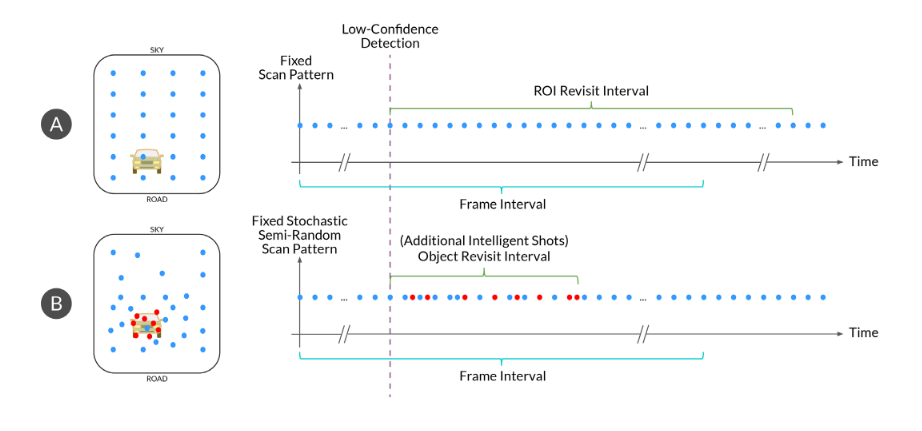
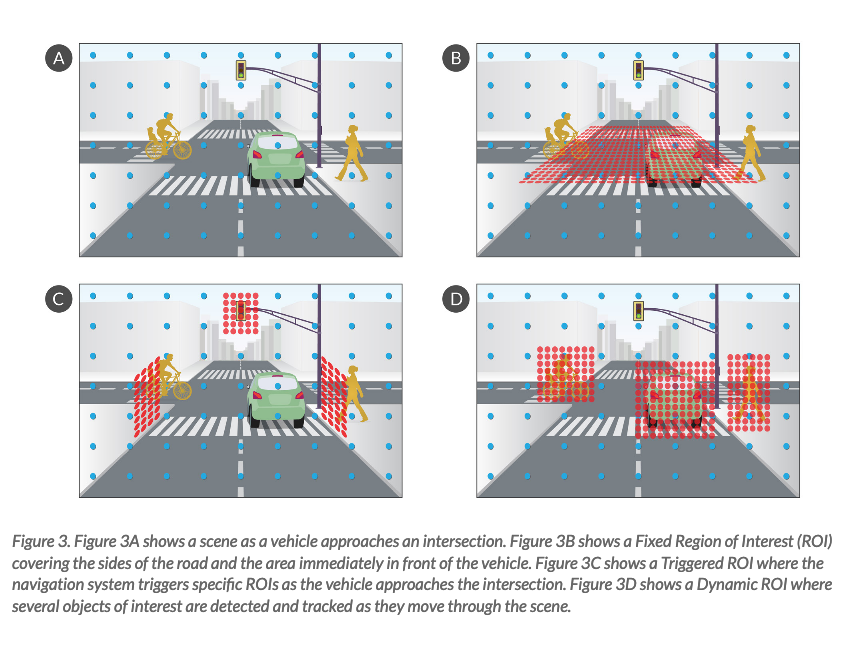
En ce qui concerne la métrique du taux de revisite d’objets dans l'image, AEye note qu’au sein des systèmes lidar passifs plusieurs interrogations/détections sur un même objet ou sur une même position dans plusieurs images sont nécessaires pour valider la présence dudit objet. Or, les nouveaux systèmes lidar intelligents peuvent accélérer le taux de revisite en réalisant une analyse des prises de vue dans une image, avec la possibilité d'interroger un objet ou une position plusieurs fois dans une seule image conventionnelle. Au-delà, AEye estime que les systèmes lidar existants sont limités par la physique de l’énergie fixe de l’impulsion laser, par les temps d’arrêt sur image fixés par avance et par les modèles de balayage fixes. Et ce alors que les systèmes de nouvelle génération peuvent être réglés par logiciel sur des items comme la détection de trajectoire et de mouvement afin d’ajuster de manière dynamique la collecte de données. Conséquence, le taux de revisite d’objets dans l'image ou le temps écoulé entre deux acquisitions sur un même point ou sur un ensemble de points est une mesure plus importante et plus pertinente que la fréquence d’acquisition des images. Pour ce qui a trait à la métrique de la résolution angulaire instantanée, AEeye explique que l’hypothèse qui sous-tend l’utilisation de la résolution en tant que mesure d’un lidar classique est que le champ de vision entier est balayé avec un motif constant et une puissance uniforme. Cependant, les technologies avancées comme celles d’AEye, fondées sur des algorithmes de vision utilisés en robotique ou dans les systèmes de défense antimissile, ont justement été développées pour permettre un changement dynamique de la densité d'échantillonnage à la fois temporelle et spatiale dans une région d'intérêt. Créant ainsi la notion de résolution instantanée. Ces régions d'intérêt peuvent être fixées au préalable mais aussi déclenchées par des conditions spécifiques ou générées dynamiquement au moment de l'exécution. « La puissance laser est une caractéristique précieuse, consommatrice d’énergie, et on doit pouvoir concentrer la puissance laser sur des objets qui comptent, précise Allan Steinhardt, responsable scientifique chez AEye. Par conséquent, il est avantageux de mesurer le nombre de résolutions supplémentaires pouvant être appliquées à la demande aux objets clés, en plus de la simple mesure de la résolution angulaire statique sur un motif fixe. Car, si on ne numérise pas de manière intelligente, on est en train soit de suréchantillonner, soit de sous-échantillonner la majorité d'une scène, gaspillant de fait de l’énergie sans gain au niveau de la valeur de l'information. »
A ce titre la technologie iDAR d’AEye est un système de perception intégré et réactif qui imite la façon dont le cortex visuel humain se concentre sur les dangers potentiels de la conduite et les évalue. En utilisant une architecture distribuée et un traitement en périphérie, l’approche d’AEye permet de suivre de manière dynamique les objets intéressants d’une scène, tout en évaluant de manière critique l’environnement général. Le matériel, configurable par logiciel, permet en outre de personnaliser de manière sélective la collecte de données en temps réel, tandis que le traitement des contours réduit le temps de latence de la boucle de contrôle. « Pour créer un système de détection efficace, deux éléments sont essentiels : la qualité des données et la vitesse à laquelle il est possible de les rendre exploitables, conclut Barry Behnken, cofondateur et vice-président de l'ingénierie chez AEye. Dans ce cadre, les mesures de performances sont importantes car elles déterminent la manière dont les concepteurs et les ingénieurs abordent la résolution des problèmes de détection d’objets à partir de données lidar. » Le livre blanc d’AEye décrit cette problématique et explique pourquoi elle est importante dans le contexte des applications automobiles réelles. |
 Enfin, en ce qui concerne la métrique de la plage de classification des objets, elle étend la notion traditionnelle de la plage de détection qui ne peut fonctionner que pour des applications simples. Car selon AEeye, dans les applications de conduite autonome, plus un capteur fournit des attributs de classification, plus le système de perception peut confirmer et classer rapidement. La plage de classification de mesure, en plus de la plage de détection, fournit donc une meilleure évaluation des capacités d’un lidar automobile, car elle élimine les inconnues dans la pile de perception en localisant plus rapidement les informations essentielles.
Enfin, en ce qui concerne la métrique de la plage de classification des objets, elle étend la notion traditionnelle de la plage de détection qui ne peut fonctionner que pour des applications simples. Car selon AEeye, dans les applications de conduite autonome, plus un capteur fournit des attributs de classification, plus le système de perception peut confirmer et classer rapidement. La plage de classification de mesure, en plus de la plage de détection, fournit donc une meilleure évaluation des capacités d’un lidar automobile, car elle élimine les inconnues dans la pile de perception en localisant plus rapidement les informations essentielles.